产品概览
LVP-H 是一个全面的融合和感知软件堆栈,支持高级 ADAS L2/L2+ 自动泊车和泊车辅助应用,包括智能泊车辅助 (IPA)、远程泊车辅助 (RPA) 和机动辅助 (MA)。基于 LeddarVision™ 低水平融合(LLF)和感知技术,传感器模式得到优化组合,性能和可靠性超越了传统解决方案,带来更安全、更舒适的无压力停车体验。LVP-H 将有效泊车检测概率提高到 95% 以上,在具有挑战性的 ODD 和环境中误报率低,并提供卓越的动态和静态物体检测,以增强安全性,包括支持先进的 NHTSA IPA 安全场景。
功能和优点
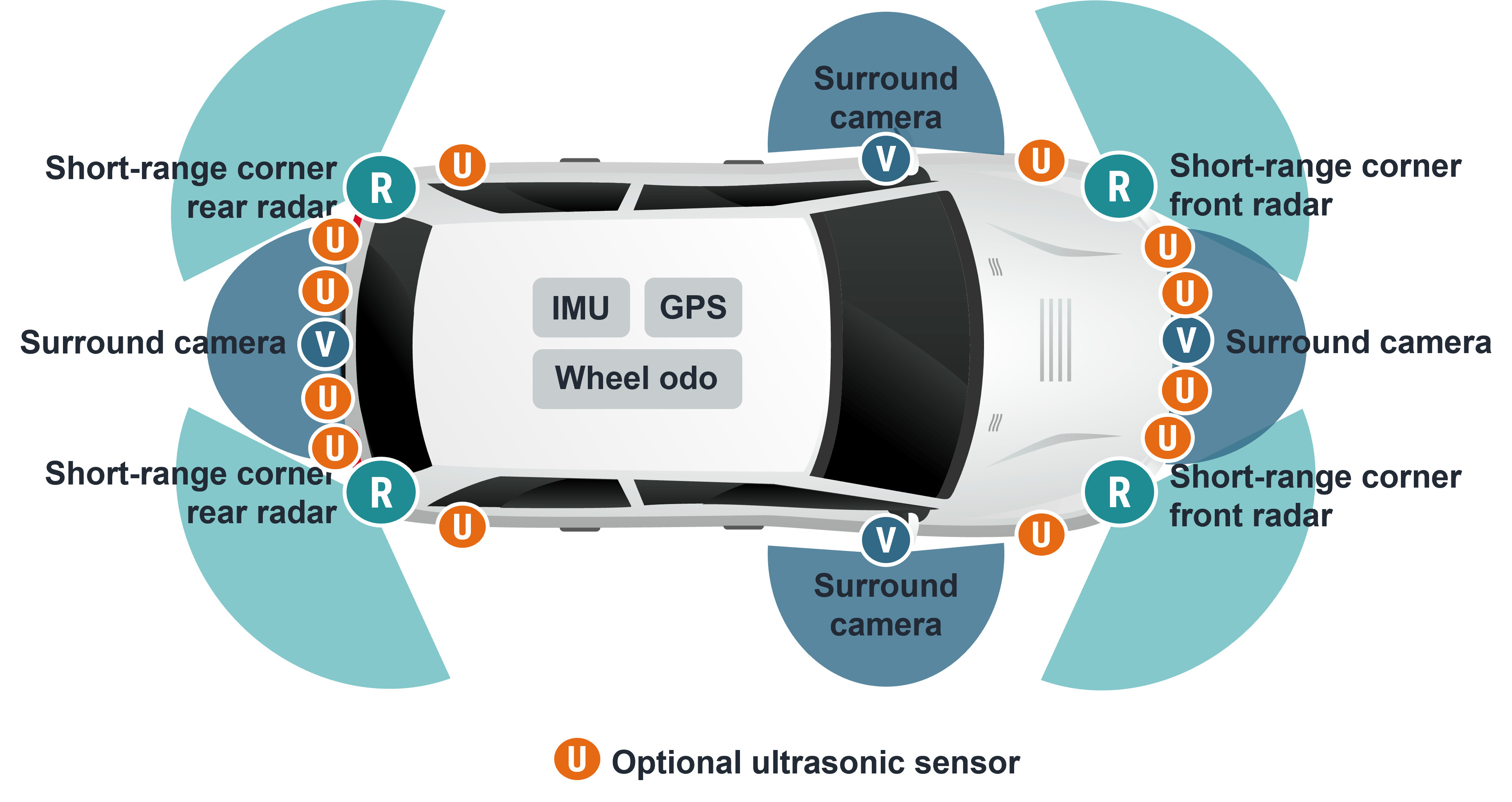
LVP-H 采用 4V4R 传感器配置,包括 4 个 190° FoV、1.3 Mpx 分辨率的鱼眼摄像头和 4 个短程角雷达,支持最多扩展 12 个超声波传感器。传感器配置和堆栈设计用于支持全面的独立停车辅助应用。在域控制器上实施,可访问所有传感器模式,从而最大限度地发挥低级融合的优势,提高性能和可靠性。
LVP-H 实现了完整的堆栈,可处理传感器接口、校准和同步、传感器融合、动态和静态物体检测和分类、有效停车位检测、精确的 3D 静态环境建模、物体和静态环境的连续过滤和稳定、停车属性检测、视觉和车辆里程计接口以及自我运动定位,为停车应用提供了全面的环境模型和人机界面可视化 API。
产品系列
LVP-H 是 LeddarVision 产品系列的一部分,通过全面的产品路线图和不断增长的功能支持,支持 ADAS 的发展。针对高级 L2/L2+ 自动泊车和泊车辅助,LVP-H 支持高级应用,包括训练有素的泊车辅助 (TPA)、车库泊车辅助 (GPA) 和倒车辅助 (RA)。扩展的感知和定位功能包括高级定位和映射、扩展的 ODD 操作和增强的驾驶 HMI,以支持低速自动驾驶应用的特殊需求。未来的 LeddarVision Unified (LVU) 产品将为 ADAS 和停车应用提供统一支持,结合 Surround (LVS) 和 Parking (LVP) 产品系列,最大限度地发挥 E/E 架构集中化趋势的优势,将集中处理扩展到单一统一的环境模型中,以实现更好的应用开发扩展性和成本。


