产品概览
LVF-H 是一个全面的融合和感知软件堆栈,支持高级前视 L2/L2+ ADAS 高速公路辅助和 5 星 NCAP 2025/GSR 2022 安全应用。LVF-H 实现了一个高级堆栈,可处理传感器接口、离线和在线校准与诊断、传感器同步、传感器融合、物体检测和分类,并可扩展至包括未分类物体和事件(如切入)、连续跟踪和稳定、自由空间检测、道路模型、综合交通标志检测、高速公路交通灯检测、车辆里程计接口、自我运动定位以及使用高清地图输入的全局定位。Stack 还能将高清地图和 V2X 等外部传感器融合到一个统一的环境模型中。堆栈通过检测到的物体轨迹预测、感知分解、对 ODD 分析的感知支持、传感器覆盖范围和健康监测,扩展了对安全功能的支持。完整的堆栈扩展了感知、定位和预测功能,为高级 L2/L2+ 和高速公路辅助 ADAS 应用程序提供了全面的单一统一环境模型和 API。
特点和优势
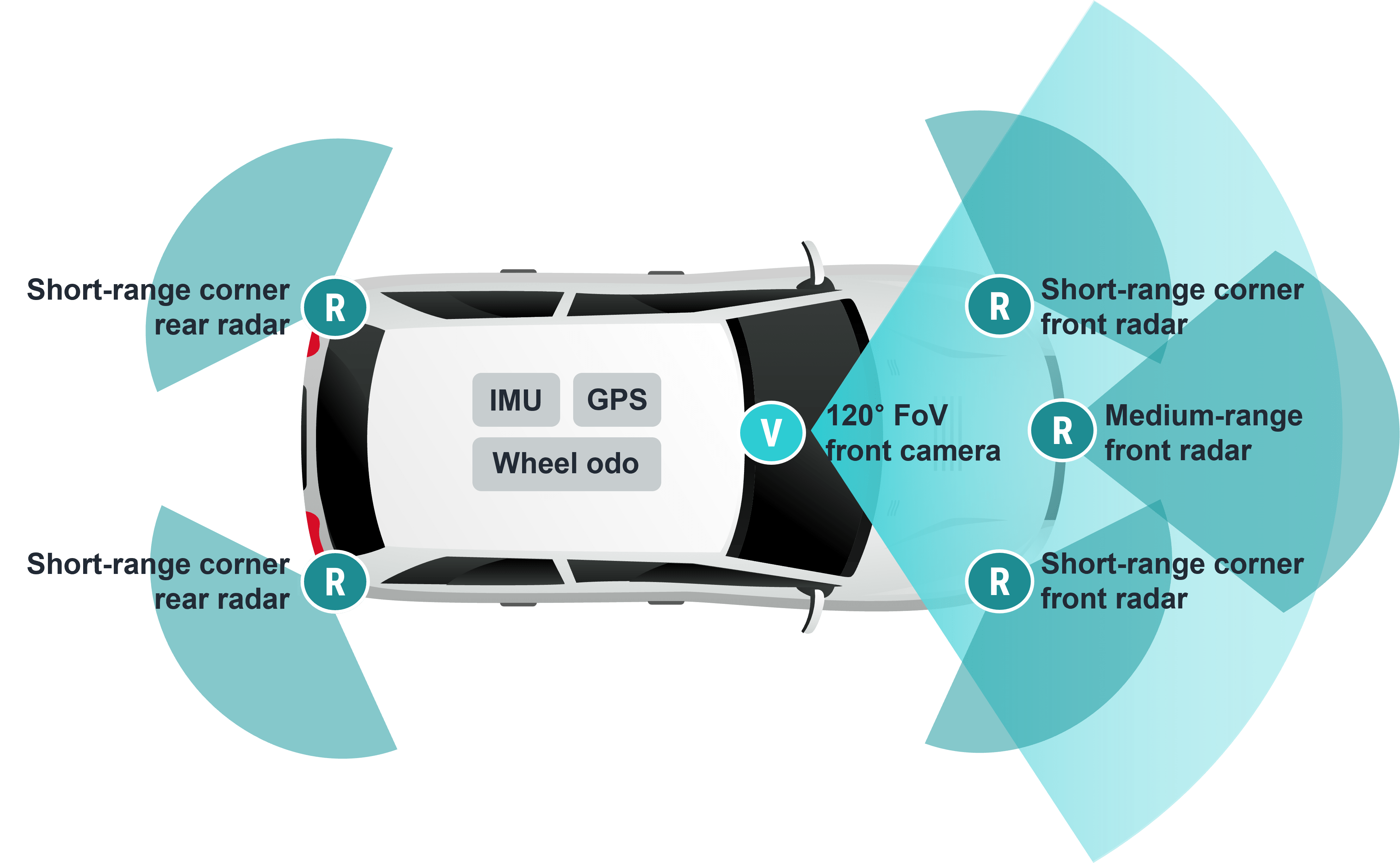
LVF-H 基于 LeddarVision™ 底层融合和感知技术,能够以较低的传感器和硬件成本提供优质的 L2/L2+ 和高速公路辅助 ADAS 产品。LVF-H 将基于前置摄像头的配置扩展为 1V5R 配置,包括一个宽视场角(120°) 级前置摄像头、一个中程前雷达和四个短程前后角雷达。前置摄像头和中程雷达将融合范围扩大到 200 米以上,ACC 支持速度高达 160 公里/小时。后部短程角雷达将 GSR 2022 和 5 星 NCAP 2025 的支持范围扩大到超车/倒车/追尾场景,高速公路辅助功能支持变道碰撞预警。LVF-H 软件堆栈以基于 TI TDA4L 的低成本 ECU 为目标,加上单个 Hailo-8 AI 处理器,共同提供超过 30 TOPS 的深度学习加速,以支持高级感知。
LVF-H 卓越的物体检测性能进一步扩展到了被遮挡的 VRU 和车辆,在 NCAP 测试场景(如被遮挡的骑车人测试)中提供早期预警。在高速公路场景中,卓越的物体分离和纵向位置测量精度可实现更高性能的自动控制。固有的传感器冗余可在传感器性能下降(如镜头脏污)、失效(如摄像头失效)或相互冲突(如雷达在护栏多径情况下发出错误警报)以及不利场景和环境(如灰尘、强光等)下提供更可靠的运行。
产品系列
LVF-H 是面向入门级到高级 ADAS 的前视产品系列的一部分。全面的路线图为不同的细分市场提供不断增长的功能支持。LVF-E 配套产品针对入门级前视 ADAS,采用最低成本的 1V2R 传感器配置,仅有一个宽视场角(120°)级前置摄像头和两个短程前角雷达,支持 GSR 和 2025 年五星级 NCAP,具有全面的感知和定位功能。
