Product Overview
The LVF-H is a comprehensive fusion and perception software stack supporting premium front-view L2/L2+ ADAS highway assistance and 5-star NCAP 2025/GSR 2022 safety applications. LVF-H implements a premium stack handling sensors’ interface, offline and online calibration and diagnostics, sensor synchronization, sensor fusion, object detection and classification, extended to include unclassified objects and events (e.g., cut-in), continuous tracking and stabilization, free space detection, road model, comprehensive traffic signs detection, highway traffic light detection, vehicle odometry interface, ego-motion localization and global localization with HD Map input. Stack further provides ability to fuse external sensors such as HD Map and V2X into a single and unified environmental model. Stack extends safety features support with detected objects trajectory prediction, perception decomposition, perception support to ODD analysis, sensor coverage and health monitoring. The complete stack extends perception, positioning and prediction features, providing a comprehensive single and unified environmental model and API to premium L2/L2+ and highway assist ADAS applications.
Features and Benefits
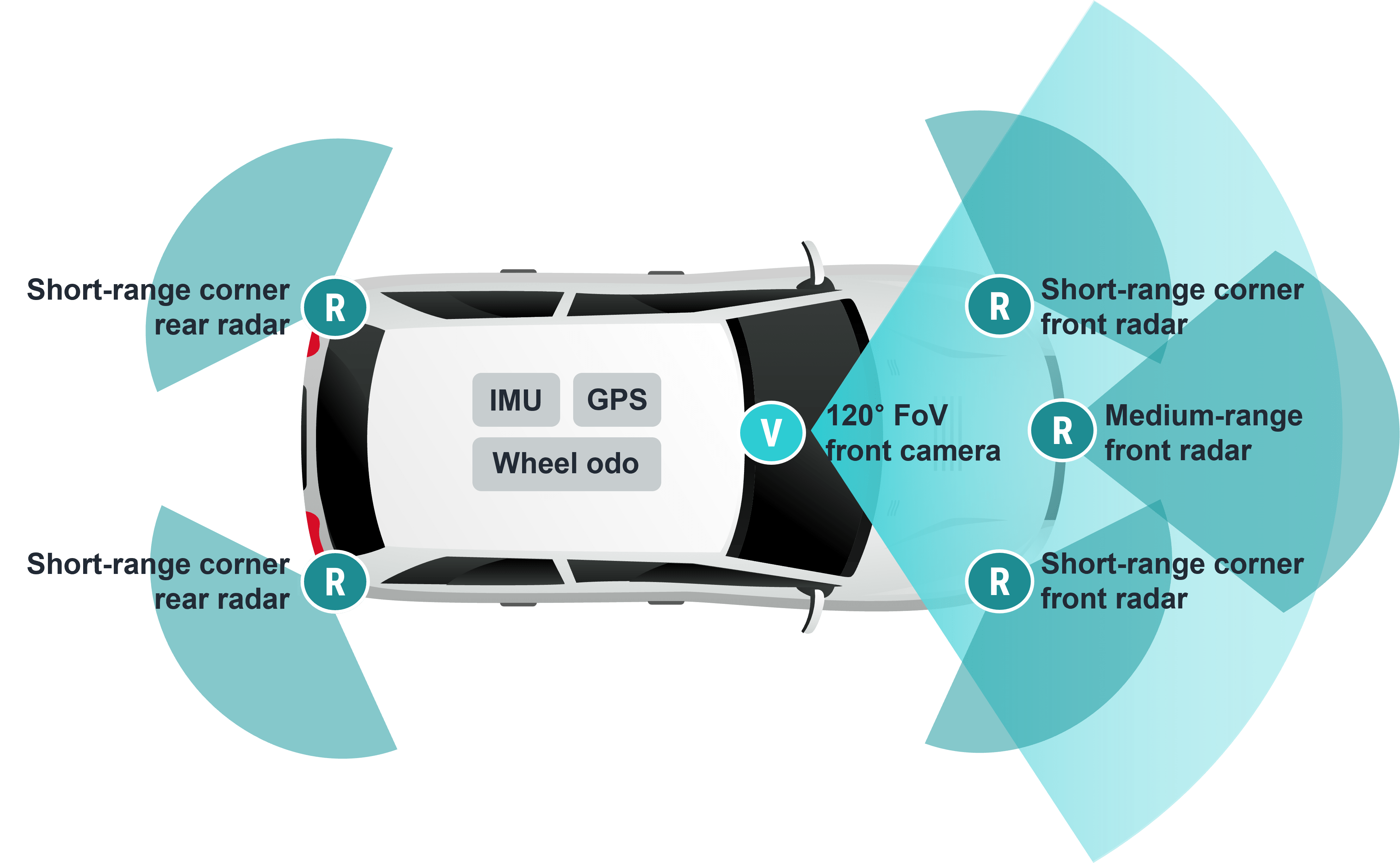
Based on LeddarVision™ low-level fusion and perception technology, it enables the premium L2/L2+ and highway assist ADAS offering at lower sensor and hardware cost. Low-level fusion optimally combines sensor modalities, pushing performance envelope far beyond legacy solutions and extending supported object detection fusion range over 200 m. LVF-H extends the front camera-based configuration to a 1V5R configuration, having a single wide FoV (120°) front camera, one medium-range front radar and four short-range front and back corner radars. Front camera and medium-range radar extends the fusion range over 200 m and ACC support up to 160 km/h. The back short-range corner radars extend the support of GSR 2022 and 5-star NCAP 2025 to overtaking/reverse/dooring scenarios and the highway assist features support to lane change collision warning.
LVF-H superior object detection performance further extends to occluded VRUs and vehicles, providing early warning in NCAP tested scenarios (e.g., occluded cyclist tests). Superior object separation and longitudinal position measurement accuracy in highway scenarios leads to higher performing ACC implementation. Inherent sensor redundancy provides a more reliable operation in presence of degraded (e.g., dirty lens), failing (e.g., failing camera) or conflicting sensors (e.g., false alarms from radars in presence of guard rails’ multipath) and adverse scenarios and environments (e.g., dust, blinding light, etc.).
Product Family
LVF-H product is part of a family of front- and surround-view products targeting entry- to premium-level ADAS. A comprehensive product roadmap provides growing features support for different market segments, including support of sensor configurations from 1V2R in entry-level front-view to 5V5R in premium surround-view. The LVS platform architecture scalability enables implementation of entry-level to premium configuration on a single architecture. LVF-H takes advantage of the LVS platform scalability to introduce “B” sample as a 1V5R derivative of the extended LVS’ 5V5R. “B” sample of LVF-H is, hence, introduced on the Orin SoC, which is used for LVS “B” sample introduction. Subsequent implementations of LVF-H software stack targeting lower-cost ECU are possible, depending on customer requirements.