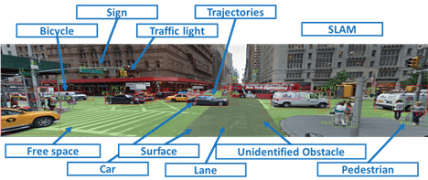

Functionality and safety require the use of multiple sensors of various types. LeddarVision is agnostic to the vehicle’s sensor type and configuration and enables raw data fusion from LiDARs, radars, cameras, GNSS and ultrasound.
This White Paper explains how perception systems are evaluated in terms of false positives and negatives as measured also through precision and recall. It also introduces the technology fundamentals, why low false alarms are critical and how different perception systems fare.
Discover the strategic intricacies of sensor fusion for constructing precise environmental models in this webinar. Acquire an incisive understanding of the implications of sensor fusion on the quality of environmental models, performance, cost, scalability and adaptability.

In December 2022, Ficosa and LeddarTech announced the signing of a development and commercialization agreement for the development of a smart automatic parking assistant. This 8-min video, featuring Ficosa and LeddarTech, lifts the lid on the development and commercialization agreement.