Aperçu du produit
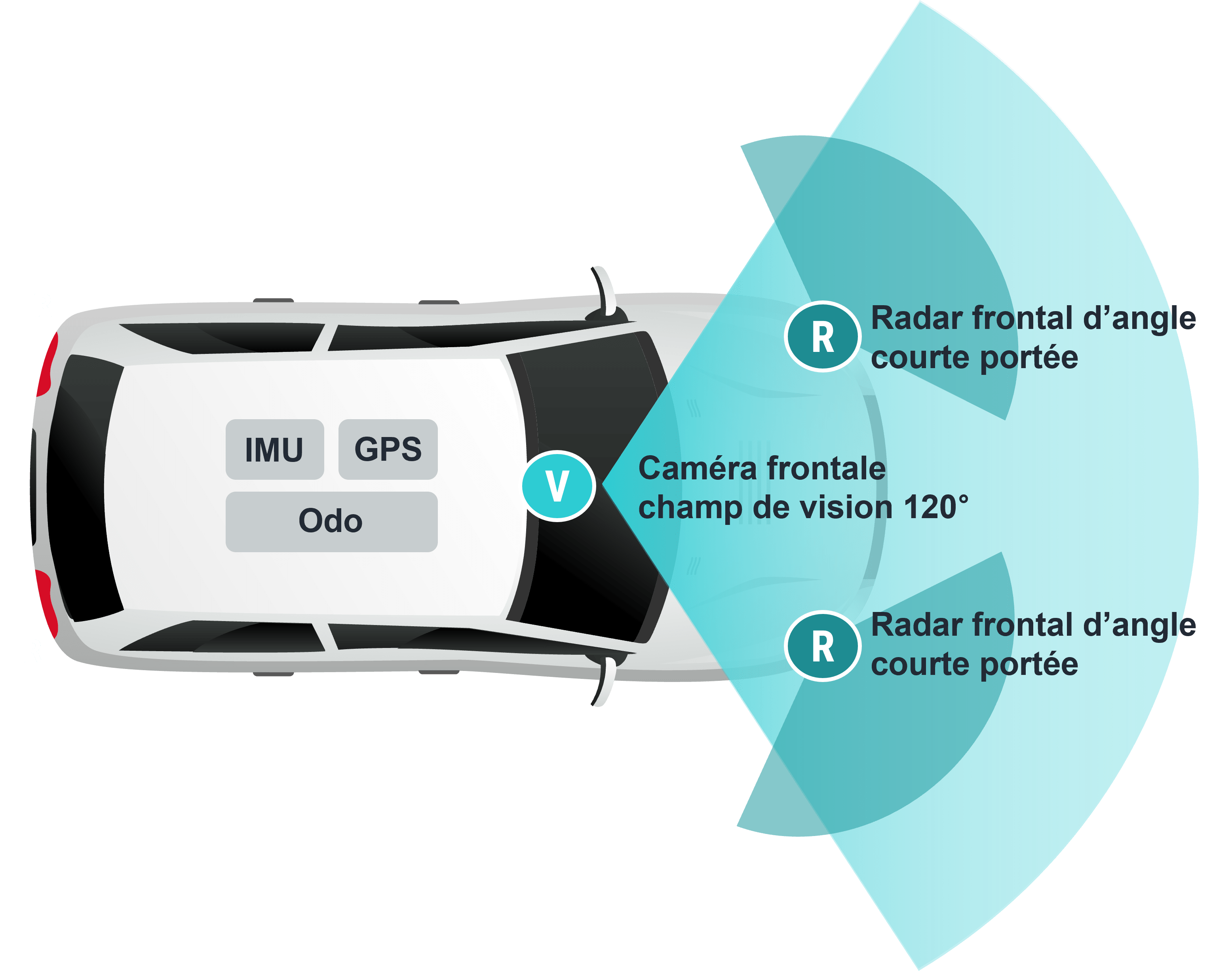
Le LVF-E est une solution logicielle complète de fusion de données de capteurs et de perception qui supporte les applications ADAS de sécurité et d’aide à la conduite sur autoroute de niveau 2/2+ de base. Reposant sur la technologie de fusion de bas niveau et de perception LeddarVision™, elle permet le déploiement de systèmes ADAS d’entrée de gamme pour un coût minimal en termes de capteurs et de matériel. La technologie de fusion bas niveau de LeddarTech combine de manière optimale les modalités de capteurs et repousse les limites du progrès technologique bien au-delà des solutions existantes : en doublant la portée de détection effective des objets à plus de 150 mètres, le système est conçu pour répondre aux exigences de sécurité 5 étoiles NCAP 2025 et GSR 2022 avec une configuration 1V2R à caméra frontale unique à large champ de vision (120°) et deux radars d’angle frontaux à courte portée. La solution logicielle LVF-E vise les applications avec ECU à faible coût optimisées pour le processeur TDA4VE à accélération d’apprentissage profond à 8 TOPS de Texas Instruments.
Caractéristiques et avantages
Le LVF-E constitue une solution complète qui prend en charge l’interface, la calibration et la synchronisation des capteurs, la fusion des données de capteurs, la détection et la classification des objets, le suivi et la stabilisation en continu, la modélisation de la route, la détection des panneaux de signalisation de vitesse et l’auto-localisation par odométrie visuelle (égomouvement), et fournit ainsi un modèle environnemental et une API exhaustifs visant les applications ADAS de niveau 2/2+ de base.
La performance supérieure du LVF-E en matière de détection des objets s’étend encore aux usagers vulnérables de la route et véhicules occultés, avec la génération d’alertes rapides dans des scénarios de test du programme NCAP (p. ex., détection de cyclistes occultés). Une précision supérieure dans la séparation des objets et dans la mesure de la position longitudinale sur autoroute permet une mise en œuvre plus efficace de la fonction de régulation de vitesse adaptative. La redondance intégrée des capteurs augmente la fiabilité de fonctionnement en cas de dégradation (p. ex., objectif encrassé), de défaillance (p. ex., panne de caméra) ou de contradiction entre capteurs (p. ex., fausses alertes en provenance des radars dues à la présence de glissières de sécurité) ainsi que dans des scénarios ou environnements défavorables (p. ex., présence de poussière, lumière aveuglante, etc.).
Famille de produits
Le LVF-E fait partie d’une famille de produits ADAS de base à vision frontale. Une feuille de route complète prévoit l’offre d’une palette de fonctionnalités distinctes selon le segment de marché. Le produit premium, le LVF-H, vise les applications ADAS étendues à vision frontale et supporte une configuration de capteurs jusqu’à 1V5R avec deux radars d’angle arrière additionnels pour une conformité étendue aux exigences 5 étoiles NCAP (scénarios de dépassement, de marche arrière et d’ouverture de portière), l’aide à la conduite sur autoroute améliorée (changement de voie semi-automatisé), un radar frontal à moyenne portée et une caméra à champ de vision de 120° pour une portée accrue, la régulation de vitesse adaptative ainsi que des caractéristiques de perception, de positionnement et de prédiction de niveau « premium ».