Aperçu du produit
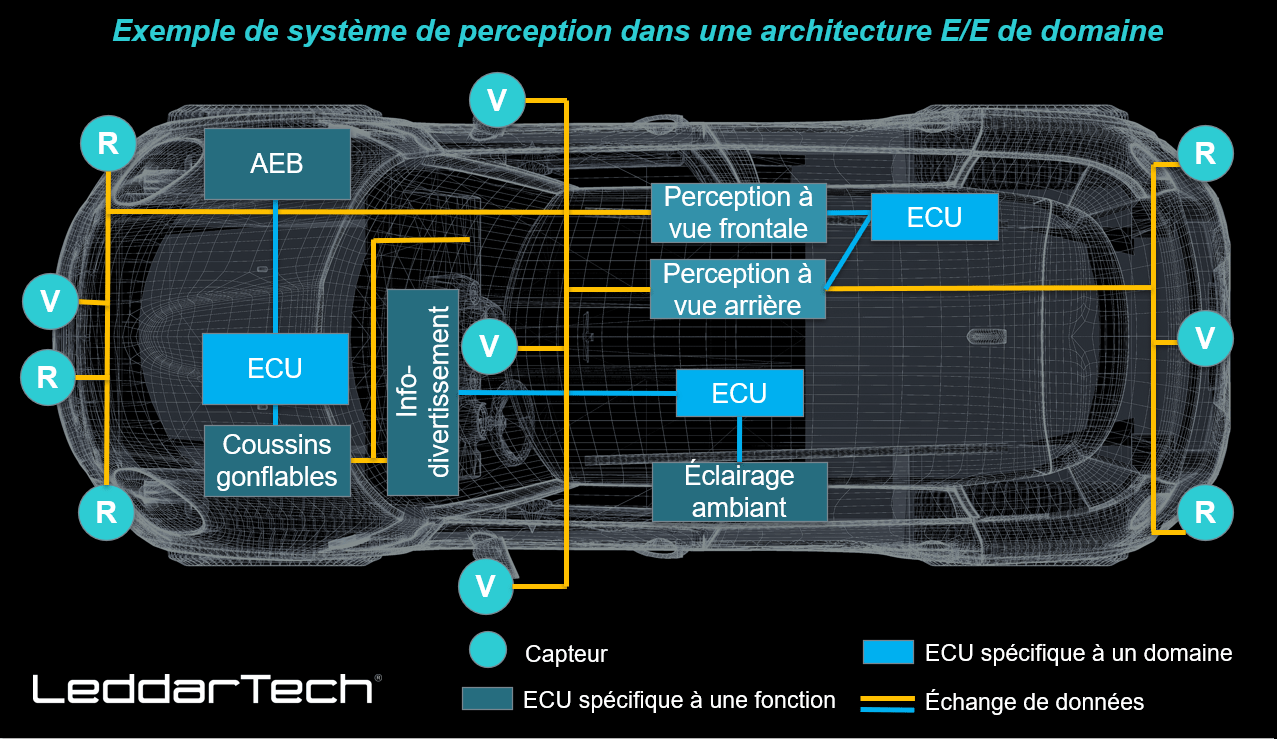
Le LVF-H est une solution logicielle complète de fusion et de perception à vision frontale qui supporte les applications ADAS de niveau 2/2+ d’aide à la conduite sur autoroute et de sécurité 5 étoiles NCAP 2025 et GSR 2022 étendues. Le LVF-H constitue une solution complète de niveau « premium » qui prend en charge l’interface, la calibration et l’analyse en ligne et hors ligne des capteurs, la synchronisation des capteurs, la fusion des données de capteurs, la détection et la classification des objets, y compris la prise en compte des objets et événements non classifiés (p. ex., changement de voie intempestif), le suivi et la stabilisation en continu, la détection de l’espace libre, la modélisation de la route, la détection intégrale des panneaux de signalisation, la détection des feux de circulation ainsi que l’auto-localisation par odométrie visuelle (égomouvement) et la localisation générale avec l’entrée HD Map. La solution permet également de fusionner des données externes comme HD Map et V2X dans un modèle environnemental unique et unifié. Les fonctions de sécurité comprennent aussi la prédiction de la trajectoire des objets identifiés, la décomposition de la perception, l’aide à l’analyse ODD par perception, la vérification de l’état des capteurs et l’autodiagnostic. Les caractéristiques de perception, de positionnement et de prédiction étendues génèrent un modèle environnemental unique et unifié et une API exhaustive à l’intention des applications ADAS de niveau 2/2+ étendues d’aide à la conduite sur autoroute.
Caractéristiques et avantages
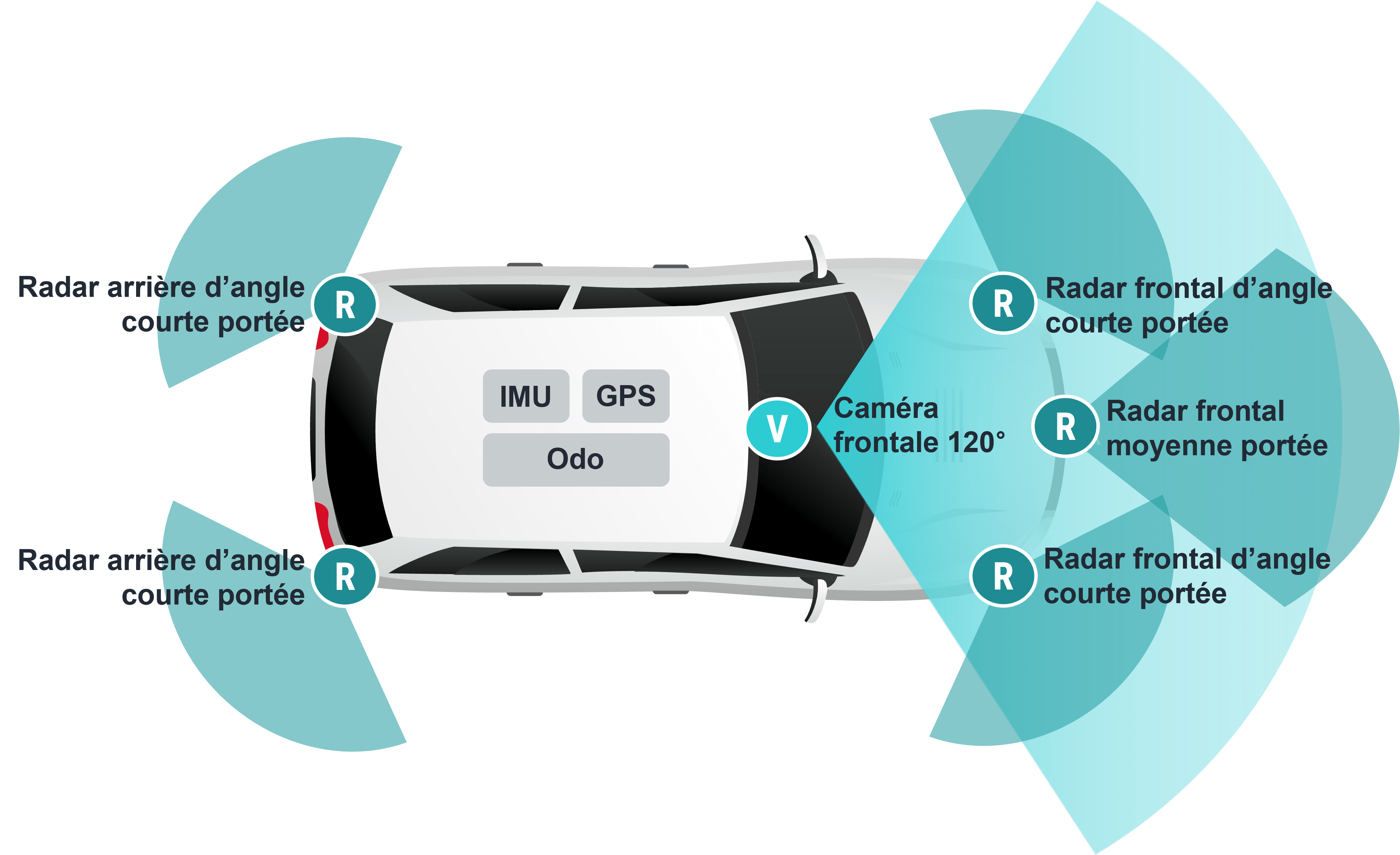
Reposant sur la technologie de fusion de bas niveau et de perception LeddarVision™, la solution LVF-H permet le déploiement de systèmes ADAS de niveau 2/2+ d’aide à la conduite sur autoroute étendues pour un coût minimal en termes de capteurs et de matériel. La technologie de fusion de bas niveau utilisée combine de manière optimale les modalités de capteurs et repousse les limites du progrès technologique bien au-delà des solutions existantes en étendant la portée de détection effective des objets à plus de 200 mètres. Le LVF-H supporte une configuration de caméras frontales jusqu’à 1V5R avec une caméra frontale unique à large champ de vision (120°), un radar frontal à moyenne portée et quatre radars d’angle frontaux et arrière à courte portée. Une caméra frontale et un radar à moyenne portée étendent la portée de la fusion de données à plus de 200 m et l’aide à la régulation de vitesse adaptative jusqu’à 160 km/h. Les radars d’angle arrière à courte portée élargissent la prise en charge des exigences 5 étoiles NCAP 2025 et GSR 2022 aux scénarios de dépassement, de marche arrière et d’ouverture de portière, et les fonctionnalités d’aide à la conduite sur autoroute s’étendent à l’avertissement anticollision sur changement de voie.
La performance supérieure du LVF-H en matière de détection des objets s’étend encore aux usagers vulnérables de la route et véhicules occultés, avec la génération d’alertes rapides dans des scénarios de test du programme NCAP (p. ex., détection de cyclistes occultés). Une précision supérieure dans la séparation des objets et dans la mesure de la position longitudinale sur autoroute permet une mise en œuvre plus efficace de la fonction de régulation de vitesse adaptative. La redondance intégrée des capteurs augmente la fiabilité de fonctionnement en cas de dégradation (p. ex., objectif encrassé), de défaillance (p. ex., panne de caméra) ou de contradiction entre capteurs (p. ex., fausses alertes en provenance des radars dues à la présence de glissières de sécurité) ainsi que dans des scénarios ou environnements défavorables (p. ex., présence de poussière, lumière aveuglante, etc.).
Famille de produits
Le LVF-H fait partie d’une famille de produits à vision frontale et à vision périphérique qui visent les applications ADAS de base à étendues. Une feuille de route complète prévoit l’offre d’une palette de fonctionnalités distinctes selon le segment de marché, dont la prise en charge de configurations de capteurs de 1V2R pour la vision frontale de base, à 5V5R pour le système étendu à vision périphérique. L’évolutivité de l’architecture de la plateforme LVS permet la mise en œuvre d’une configuration d’entrée de gamme à « premium » sur une architecture unique. Le LVF-H tire parti de l’évolutivité de la plateforme LVS pour introduire l’échantillon « B » comme dérivé 1V5R de la configuration 5V5R étendue du LVS. L’échantillon « B » du LVF-H est donc introduit sur le processeur Orin, qui est utilisé pour l’introduction de l’échantillon « B » du LVS. Des mises en œuvre ultérieures de la solution logicielle LVF-H ciblant des ECU à moindre coût sont possibles selon les exigences clients.