
Bien que tous les acteurs de l’industrie automobile parlent du développement de technologies pour voitures autonomes (ce qui est l’objectif ultime), ce qu’on voit se dessiner dans un horizon plus prévisible est plutôt la voiture hautement autonome. C’est-à-dire une voiture dans laquelle beaucoup de fonctions de conduite sont prises en charge par le tableau de bord du véhicule dont, par exemple, le freinage d’urgence ou la bifurcation d’urgence, ou même l’action d’entrer ou de sortir de l’autoroute. Ce sont des fonctions qui permettent au véhicule de prendre le contrôle dans des circonstances bien précises. Souvent, ce sont ce qu’on appelle des fonctions de sécurité.
D’après les statistiques de l’OMS, environ 1,35 million d’individus meurent chaque année dans un accident de la route dans le monde, et entre 30 et 50 millions sont gravement blessés dans des accidents de voiture. Et, dans 85 % des cas, ces accidents découlent du facteur humain, par exemple parce que le conducteur est distrait, fatigué, ou a de la difficulté à bien voir la route à cause des conditions climatiques ou autres facteurs. Les nouvelles fonctions hautement autonomes permettront de compenser ces facteurs.
 Un des premiers aspects permettant le déploiement des fonctions hautement automatisées est le développement de nouvelles technologies. Celles développées par LeddarTech, tels que la technologie de détection LiDAR et les d’algorithmes d’intelligence artificielle et de perception, permettent de « cartographier » l’environnement en 3D (trois dimensions) et de donner une image virtuelle à 360 degrés permettant au véhicule de percevoir son environnement à 200 à 300 mètres. Ceci procure des informations critiques qui permettent au système de conduite du véhicule de prendre des décisions même dans des conditions routières extrêmes (telles que la neige, le brouillard, l’obscurité, les tunnels, etc.). Ces technologies, qui sont disponibles aujourd’hui, sont en cours de test et d’homologation pour pouvoir être utilisées sur nos routes dans un futur rapproché. L’objectif est d’augmenter la sécurité des usagers de la route tout en augmentant aussi les capacités humaines grâce à une technologie qui est en alerte permanente.
Un des premiers aspects permettant le déploiement des fonctions hautement automatisées est le développement de nouvelles technologies. Celles développées par LeddarTech, tels que la technologie de détection LiDAR et les d’algorithmes d’intelligence artificielle et de perception, permettent de « cartographier » l’environnement en 3D (trois dimensions) et de donner une image virtuelle à 360 degrés permettant au véhicule de percevoir son environnement à 200 à 300 mètres. Ceci procure des informations critiques qui permettent au système de conduite du véhicule de prendre des décisions même dans des conditions routières extrêmes (telles que la neige, le brouillard, l’obscurité, les tunnels, etc.). Ces technologies, qui sont disponibles aujourd’hui, sont en cours de test et d’homologation pour pouvoir être utilisées sur nos routes dans un futur rapproché. L’objectif est d’augmenter la sécurité des usagers de la route tout en augmentant aussi les capacités humaines grâce à une technologie qui est en alerte permanente.
L’évolution de la législation est un deuxième élément clé en train de se concrétiser. Plusieurs pays mettent en place un environnement légal permettant d’encadrer l’utilisation de fonctions hautement automatisées sur les routes comme le Japon (en prévision des Jeux Olympiques), l’Allemagne, les États-Unis et la Chine. Ces environnements facilitateurs favorisent une accélération du développement ainsi que le déploiement de ces nouvelles technologies. Ainsi, dans l’horizon 2023 à 2025, la plupart des véhicules qui sortiront des chaînes de production auront des fonctions d’aide à la conduite hautement autonomes.
D’autres pays ont une approche plus conservatrice : au Canada, par exemple, on peut utiliser un régulateur de vitesse intelligent sur l’autoroute mais le conducteur doit tout le temps avoir les deux mains sur le volant. La législation devra changer pour permettre que le véhicule utilise le système de guidage pour manœuvrer, entrer et sortir d’une autoroute ou permettre le pilotage dans le trafic sans que le conducteur soit obligé de garder les mains sur le volant en permanence. Au bout du compte, le Canada n’aura pas d’autre choix que de suivre le mouvement.
Un troisième élément clé pour l’adoption des fonctions autrement automatisées est la confiance du public. Il existe encore beaucoup de méfiance et de réticence dans la population à l’idée de céder le contrôle du véhicule à un système automatisé et à faire confiance à ces nouvelles technologies, ce qui est tout à fait normal étant donné qu’il s’agit de notre sécurité sur la route. Et si on accepte que l’humain n’est pas infaillible, il en va autrement pour les systèmes de conduite, qui n’ont pas droit à l’erreur.
L’objectif est d’améliorer le niveau de sécurité pour tous les usagers de la route. En fait, les technologies avancées d’aide à la conduite viennent « augmenter » la capacité humaine en permettant, par exemple, de voir en permanence sur 360 degrés, de percevoir à travers un brouillard dense, de détecter un obstacle dans le noir, ou de compenser un moment d’inattention ou de grande fatigue du conducteur. Le véhicule peut voir ou percevoir des dangers réels ou potentiels qu’un conducteur ne peut remarquer. Dans ce contexte, on parle vraiment de fonctions d’aide à la conduite en complément de l’humain pour augmenter de façon substantielle la sécurité.
 De plus, une crainte souvent exprimée est la possibilité de piratage des systèmes informatiques des véhicules et de leur prise de contrôle à distance. Ce risque existe, et les développeurs de systèmes en sont pleinement conscients. C’est pourquoi les véhicules qui utilisent des fonctions avancées d’aide à la conduite sont équipés de systèmes redondants qui peuvent prendre ou céder le contrôle dans le cas d’une défaillance ou d’une tentative de piratage. Ces systèmes de sécurité sont similaires dans leurs fonctions à ce qu’on retrouve sur d’autres systèmes d’automatisation, comme par exemple ceux des avions, afin d’en assurer la robustesse et la protection.
De plus, une crainte souvent exprimée est la possibilité de piratage des systèmes informatiques des véhicules et de leur prise de contrôle à distance. Ce risque existe, et les développeurs de systèmes en sont pleinement conscients. C’est pourquoi les véhicules qui utilisent des fonctions avancées d’aide à la conduite sont équipés de systèmes redondants qui peuvent prendre ou céder le contrôle dans le cas d’une défaillance ou d’une tentative de piratage. Ces systèmes de sécurité sont similaires dans leurs fonctions à ce qu’on retrouve sur d’autres systèmes d’automatisation, comme par exemple ceux des avions, afin d’en assurer la robustesse et la protection.
Car afin d’assurer l’adhésion du grand public, les systèmes hautement automatisés devront être extrêmement fiables. Or, les récentes études exhaustives sur des fonctions d’aide à la conduite disponibles dans les véhicules de séries vendues aujourd’hui démontrent que ce n’est pas encore tout à fait le cas (source : AAA).
Ces systèmes actuellement déployés utilisent la caméra et le radar comme moyens de détection. La caméra capture les images nécessaires pour la navigation, et est ce qui se rapproche le plus de l’œil humain. Mais c’est insuffisant en soi : la caméra est facilement obstruée si elle est sale ou qu’il pleut; elle peut être aveuglée par une lumière forte et perd en performance dans un environnement sombre. De plus, une caméra ne peut fournir aucune information sur la distance des objets.
C’est pourquoi d’autres mesures sensorielles sont utilisées comme le radar, qui utilise les ondes radio. Le radar offre des avantages pour détecter les obstacles en situation de météo ou d’éclairage difficiles, mais il est incapable de profiler les objets avec précision et de déterminer leur nature exacte.
Lorsque la performance du système est instable ou insuffisante, beaucoup de conducteurs perdent confiance et vont simplement désactiver celui-ci, préférant se fier à leur instinct naturel.

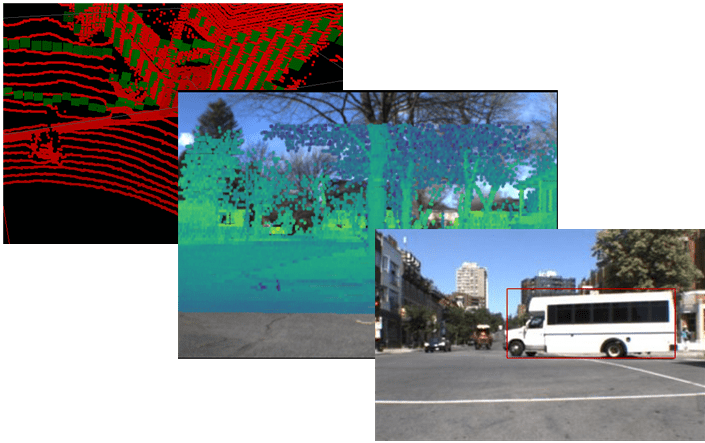
C’est ici qu’intervient le LiDAR, qui émet la lumière pulsée d’un laser des millions de fois à la seconde et capte l’écho lumineux reflété par les objets et l’environnement. Ces échos vont pouvoir nous dire : « Oui, il y a un objet dans la scène », et donner des informations permettant d’estimer avec précision sa taille, sa position, sa distance et sa vitesse. Les données du LiDAR permettent ainsi de recréer virtuellement la scène en trois dimensions.
En ajoutant cette troisième modalité de détection aux systèmes de navigation, la performance et la fiabilité sont grandement augmentées, ce qui permet de concevoir des solutions plus sûres. Ainsi, le LiDAR est aujourd’hui considéré comme essentiel pour offrir une solution de détection répondant pleinement aux besoins des fonctions avancées d’aide à la conduite et pour les véhicules autonomes.
De plus, au lieu de traiter les données de chaque type de capteur séparément, les systèmes de fusion et de perception de nouvelle génération (tel que le LeddarVision™ de LeddarTech) effectuent la fusion des données issues de ces différents capteurs afin d’en faire l’analyse de façon holistique grâce à des algorithmes hautement optimisés et l’intelligence artificielle, ce qui permet d’obtenir une performance accrue ainsi qu’une grande efficacité computationnelle.
Cependant, bien que la technologie requise soit disponible ou le sera bientôt, le temps requis pour l’avènement des véhicules personnels complètement autonomes se compte probablement en décennies, étant donné la R&D, les investissements et les tests intensifs requis, ainsi que les enjeux humains, sociaux et légaux associés. Les lois permettront-elles la pleine autonomie des véhicules? Sous quelles conditions et dans quels environnements? Quel sera le niveau de tests requis pour atteindre un niveau de fiabilité suffisant pour assurer un fonctionnement sûr à 100 % en permanence, dans l’ensemble des environnements et des scénarios possibles?
L’être humain a des millions d’années d’évolution sensorielle et cognitive derrière lui. Actuellement, on développe encore essentiellement les systèmes de conduite en environnement virtuel, et de nombreuses années seront requises avant qu’on puisse valider tous les cas possibles et rendre le système assez intelligent pour qu’il soit capable d’évaluer, de prédire ou de réagir à toutes les situations. Cela étant dit, les véhicules sont depuis une dizaine d’années beaucoup plus sûrs qu’ils ne l’étaient auparavant grâce à l’intégration de systèmes sensoriels plus performants, et à des systèmes de perception et d’aide à la conduite à moindre coût. C’est déjà un gain majeur, et on peut affirmer avec assurance que cette tendance continuera et s’accélérera dans la prochaine décennie avec le déploiement de solutions d’aide à la conduite de plus en plus sophistiquées et efficaces dans nos véhicules. Les technologies que LeddarTech développe en collaboration avec ses partenaires, qui sont tous des leaders établis dans le secteur de l’automobile, vont faciliter le déploiement de véhicules plus sûrs afin de réduire le nombre d’accidents sur nos routes.