
Pour les ingénieurs ADAS (systèmes avancés d’aide à la conduite), l’évolution de la technologie des capteurs et des systèmes de perception dans l’industrie automobile est sans conteste une aventure passionnante. Ces avancées révolutionnent le fonctionnement des véhicules et repoussent les limites de la sécurité, du confort et de la mobilité automobiles. Une autre tendance qui domine les discussions sur le véhicule du futur est de savoir à quoi ressemblera le véhicule défini par logiciel et ce qu’il faut pour soutenir cette transformation. De plus en plus, les équipementiers automobiles et les constructeurs de rang 1 et 2 entrevoient le véhicule du futur comme une « centrale logicielle » dont les capacités, l’utilité, les performances et l’expérience de mobilité sont définies par le logiciel. L’épine dorsale sur laquelle s’effectue cette transformation est l’architecture électrique et/ou électronique (E/E) du véhicule. Le présent blogue se penche sur la manière dont les systèmes de fusion de capteurs et de perception et l’ADAS influencent l’architecture E/E des véhicules modernes.
La technologie de fusion de capteurs et de perception est au cœur des systèmes ADAS. Ensemble, la fusion de capteurs et la perception permettent au véhicule de comprendre l’environnement dans lequel il évolue. La fusion de capteurs est l’art d’harmoniser les données provenant de divers capteurs en une représentation unifiée et cohérente de l’environnement. Cette intégration est essentielle car chaque capteur se démarque dans des conditions et des environnements spécifiques. Par exemple, une caméra fournit des données visuelles à haute résolution, un radar donne de bons résultats dans des conditions défavorables et le LiDAR offre une bonne précision dans la mesure des distances.
Le chef d’orchestre de cette symphonie est l’unité de commande électronique (ECU), ou unité centrale de traitement (CPU). Cette centrale traite les données de détection entrantes, les fusionne de manière transparente et génère une vue d’ensemble de l’environnement du véhicule.
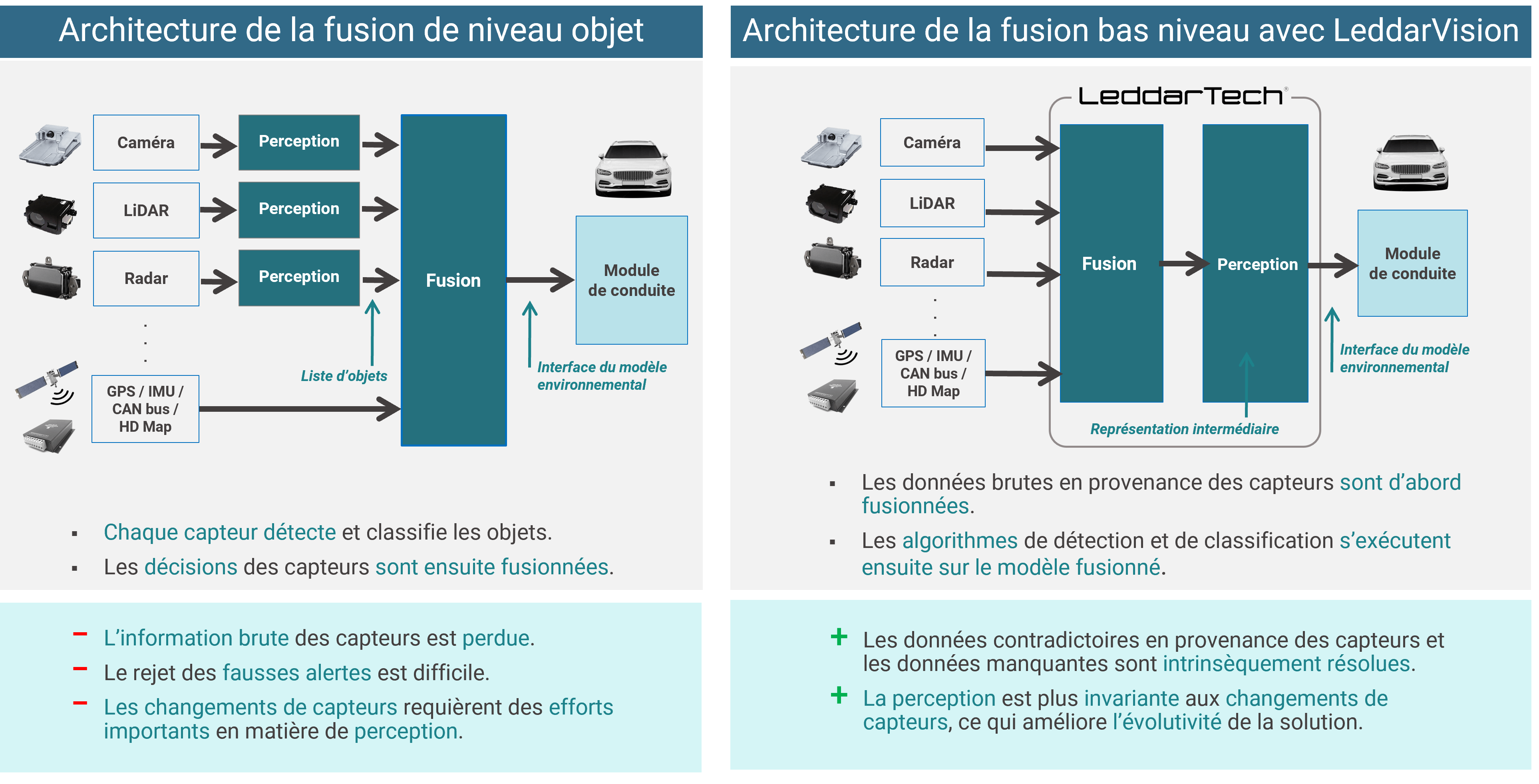
Deux approches différentes sont possibles pour réaliser la fusion de capteurs et la perception pour ce qui est des systèmes ADAS et AD : la fusion de niveau objet et la fusion de bas niveau. Cliquez ici pour en savoir plus sur les deux stratégies, la différence entre les techniques et la raison pour laquelle la fusion de bas niveau surclasse la fusion de niveau objet afin de générer un modèle environnemental RGBD 3D sans contradictions entre données de capteurs.
Lorsqu’ils élaborent l’architecture E/E du véhicule défini par logiciel de demain, les concepteurs doivent tenir compte d’une multitude de facteurs tels que la facilité d’intégration, la compatibilité électromagnétique (CEM), la gestion de la puissance, la sécurité des données, la prise en charge des fonctionnalités, les tests et la validation, l’interopérabilité, la prise en charge de la communication V2X, les mises à jour logicielles et bien d’autres encore. Le logiciel de fusion de capteurs et de perception joue un rôle essentiel en influençant l’architecture E/E du véhicule et lui impose des exigences particulières, qui vont des capacités de traitement et de la distribution de puissance aux contraintes de câblage. Ces aspects sont expliqués plus en détail dans la section suivante.
Processeurs surpuissants : la technologie de fusion de capteurs et de perception nécessite de grandes capacités de traitement. Elle exige une puissance de traitement considérable, ce qui a une incidence directe sur l’architecture électrique, notamment sur la distribution de la puissance électrique et de la puissance de calcul. Les véhicules modernes intègrent au cœur de leur architecture électrique des CPU ou des GPU (unités de traitement graphique) très performants, qui gèrent des flux de données massifs en temps réel. Ces véhicules sont équipés de matériel spécifique à l’IA, comme des unités de traitement neuronal (NPU), afin d’accélérer les tâches reposant sur l’IA.
Les applications ADAS qui s’appuient sur la fusion de bas niveau demandent moins de puissance de calcul de la part des processeurs, ce qui se traduit par une réduction des coûts E/E.
Distribution de puissance : les systèmes de fusion de capteurs et de perception font appel à l’apprentissage automatique et à la vision numérique pour générer des modèles environnementaux. De tels systèmes imposent de solides exigences de consommation de puissance au véhicule. Alors que l’industrie automobile se tourne vers l’avenir des véhicules électriques, la consommation d’énergie des systèmes de fusion de capteurs et de perception a une incidence directe sur l’autonomie des véhicules. En juin 2023, pour la première fois dans l’industrie, LeddarTech a démontré la performance d’une solution de fusion bas niveau de capteurs et de perception (LVF-E) sur le processeur hautement intégré et économique TDA4VM-Q1 8 TOPS (lien en anglais) de Texas Instruments.
La possibilité de faire rouler une solution de perception sur un processeur doté d’une puissance de calcul limitée et moins énergivore constitue une percée pour les développeurs ADAS et les architectes E/E, car elle réduit les coûts et permet aux architectes E/E de détourner une puissance de traitement et de calcul précieuse ailleurs sur le véhicule.
Communication : des réseaux robustes comme Ethernet et Controller Area Network (CAN) sont essentiels. Ils permettent un échange de données parfaitement fluide entre les capteurs, les unités de commande et les autres éléments du véhicule, garantissant que les données atteignent rapidement les bonnes destinations. Les applications ADAS doivent fonctionner en temps réel, car la plupart des fonctionnalités ADAS de sécurité et de confort sont sensibles au facteur temps. Les fonctionnalités ADAS utilisent des systèmes d’exploitation en temps réel (RTOS) pour s’assurer que les tâches sont exécutées dans les délais impartis. En outre, pour maintenir les fonctionnalités ADAS à jour et adaptables, les constructeurs automobiles adoptent les mises à jour en direct. Cette méthode nécessite une architecture électrique flexible pour prendre en charge les mises à jour logicielles à distance, permettant ainsi aux véhicules de rester performants dans un paysage en constante évolution.
Câblage et intégration : les données du système de perception doivent être intégrées à d’autres systèmes E/E, tels que les systèmes de commande et les interfaces utilisateur du véhicule, afin de fournir une vue d’ensemble de l’environnement du véhicule. De plus, les capacités ADAS d’un véhicule sont influencées par les capteurs embarqués. L’emplacement et la quantité des capteurs ont une incidence directe sur les exigences de câblage.
Couplage logiciel/matériel : certains systèmes de fusion de capteurs et de perception sont liés au matériel, c.-à-d. que leur compatibilité est limitée à des types de capteurs ou de processeurs spécifiques. Ceci gêne les architectes E/E dans leur philosophie de conception et les rend dépendants des fournisseurs de solutions de fusion de capteurs et de perception. De tels systèmes contrarient les architectes E/E car l’évolutivité devient alors un défi. Concevoir des plateformes E/E lorsqu’on utilise de telles solutions devient fastidieux. Le logiciel de fusion bas niveau de capteurs et de perception de LeddarTech, LeddarVision™, est une solution indépendante des capteurs et des processeurs : il permet aux architectes E/E de concevoir le véhicule, la plateforme et le logiciel embarqué sans être limités par la solution de perception.
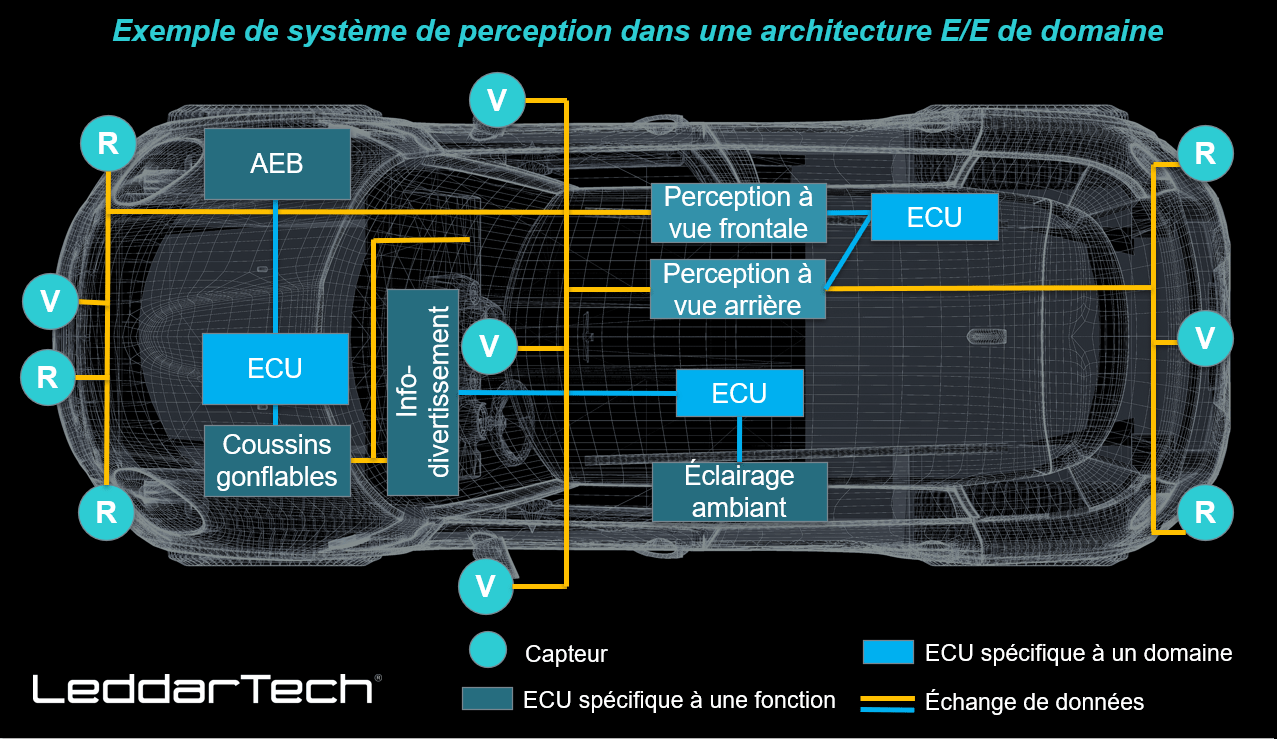
Figure 2 : Exemple de mise en œuvre d’un système de fusion de capteurs et de perception dans la conception E/E
Exigences de redondance : sécurité et fiabilité sont au centre des préoccupations. L’approche traditionnelle de fusion de capteurs nécessite l’implication de plusieurs capteurs du même type pour assurer la redondance. La technologie dernier cri de fusion de bas niveau permet de maintenir une bonne fiabilité de fonctionnement même en cas de dégradation ou de défaillance d’un capteur. La fusion de bas niveau offre une redondance en recourant à moins de capteurs. Ceci influe sur l’architecture électrique en réduisant les besoins de câblage et d’intégration.
Intégrité et sécurité des données : la protection de l’intégrité des données est capitale. Les véhicules s’appuyant sur des données pour prendre des décisions de vie ou de mort, toute compromission de l’intégrité des données pourrait être catastrophique. Il est donc primordial de disposer de mécanismes robustes de cryptage, d’authentification et de détection des intrusions au sein de l’architecture électrique. Des fonctionnalités ADAS comme le freinage automatique d’urgence, l’avertissement de sortie de voie ou l’avertissement d’angle mort permettent de sauver des vies. La cybersécurité et l’intégrité des données sont essentielles pour la sécurité, et les architectes E/E doivent tenir compte de leur impact sur les applications ADAS.
Le monde électrisant des systèmes de fusion de capteurs et de perception est un terrain de jeu propice à l’innovation et aux prouesses technologiques. Ces technologies réécrivent les règles de fonctionnement des véhicules, exigeant une plus grande puissance de calcul, des réseaux de communication robustes et une intégration logicielle hermétique. Les choix que font aujourd’hui les développeurs ADAS et les architectes E/E seront déterminants pour le véhicule défini par logiciel de demain.
La fusion de bas niveau offre de nombreux avantages par rapport à la fusion de niveau objet pour l’ADAS :
Grâce à la prise en charge de la communication V2X, LeddarVision est conçu non seulement pour les véhicules de production d’aujourd’hui, mais aussi pour ceux de demain.
À mesure que l’industrie automobile progresse, nous pouvons nous attendre à des avancées encore plus stupéfiantes dans la technologie des capteurs et des systèmes de perception, qui transformeront encore davantage l’architecture électrique et électronique des véhicules. Cette révolution promet non seulement d’offrir la commodité, mais aussi de constituer un bond en avant en matière de sécurité et d’efficacité : un avenir où les véhicules deviendront des compagnons de route intelligents, appuyés par les systèmes avancés d’aide à la conduite.