
Download Complete White Paper in PDF Format
For ADAS (advanced driver assistance systems) engineers, the evolution of sensor technology and perception systems in the automotive industry is nothing short of a thrilling adventure. These advancements are revolutionizing how vehicles operate, pushing the boundaries of automotive safety, comfort and mobility. Another trend dominating discussions on the vehicle of the future is what the software-defined vehicle will look like and what is required to support that transformation. Increasingly, automotive OEMs and Tier 1-2s view the vehicle of the future as a software powerhouse, one whose ability, value, performance and mobility experience is defined by the software. The backbone on which this transformation takes place is the electrical and/or electronic (E/E) architecture of the vehicle. This white paper will delve into the nitty-gritty details of how sensor fusion and perception systems that enable ADAS influence modern vehicles’ E/E architecture.
Sensor fusion and perception is at the heart of ADAS systems. Together, sensor fusion and perception enable the vehicle to understand the environment it is operating in. Sensor fusion is the art of harmonizing data from various sensors into a unified, coherent representation of the surroundings. This integration is essential because each sensor excels in specific conditions and environments. For instance, a camera provides high-resolution visual data, radar performs well in adverse conditions and LiDAR offers precision in distance measurement.
The conductor of this symphony is the electronic control unit (ECU) or central processing unit (CPU). This powerhouse processes incoming sensor data, seamlessly blends it and presents a holistic view of the vehicle’s surroundings.
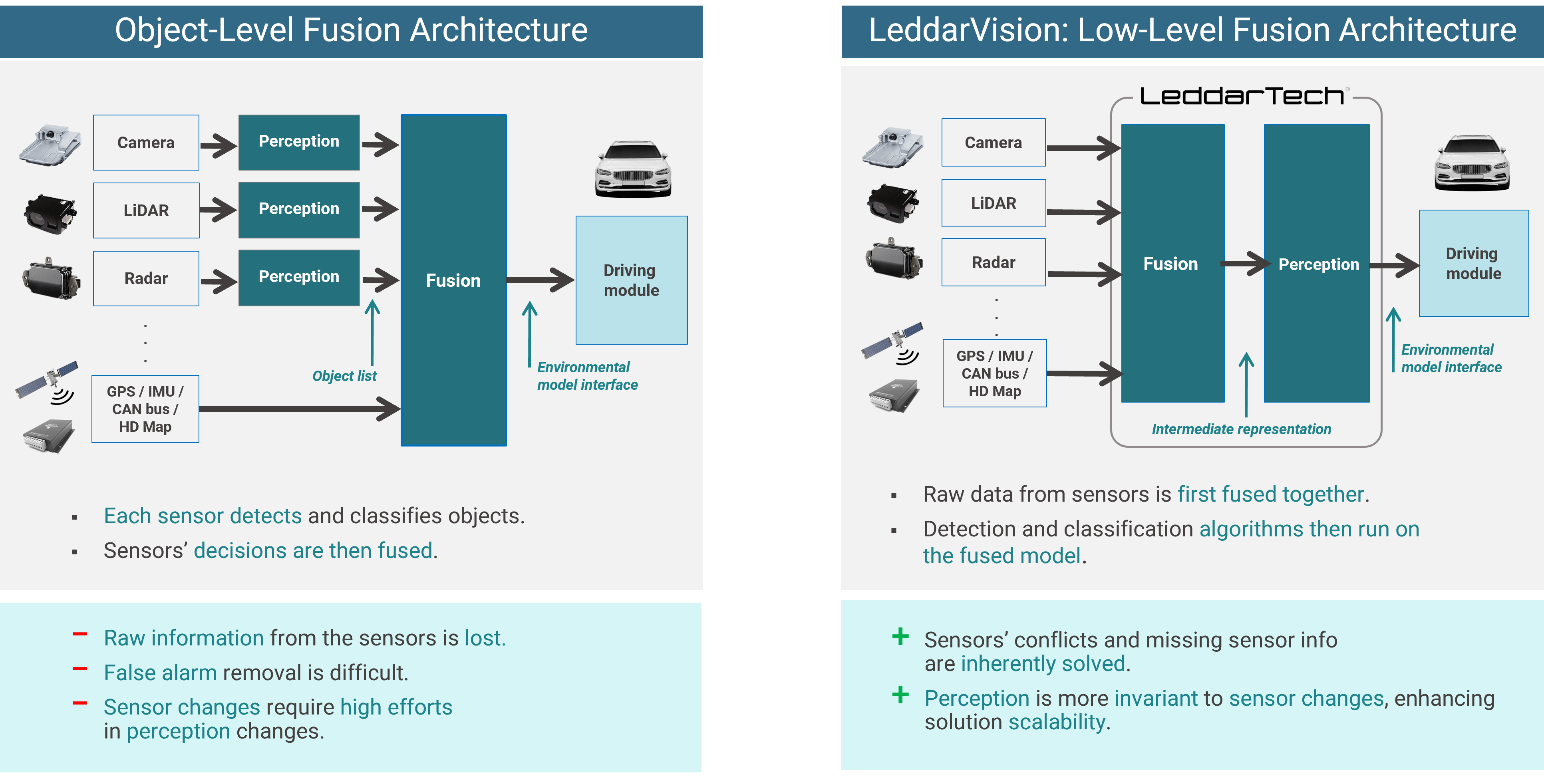
There are two ways in which sensor fusion and perception is performed for ADAS and AD systems: object-level and low-level fusion. Click here to learn about the two approaches, the difference in techniques and why low-level fusion outperforms object-level fusion to deliver a 3D RGBD environmental model with no sensor contradictions.
E/E designers must consider a multitude of factors, such as ease of integration, electromagnetic compatibility (EMC), power management, data security, feature support, testing and validation, interoperability, support for V2X communication, software updates and many more when designing the E/E architecture of the software-defined vehicle of tomorrow. Sensor fusion and perception software plays a critical role in influencing the E/E architecture of the vehicle and imposes special demands on it. These special demands range from processing capabilities and distribution of power to wiring challenges. This is explained in greater detail in the following section.
Powerhouse processors: Sensor fusion and perception systems necessitate robust processing capabilities. They demand substantial processing power, which directly affects the electrical architecture, including electrical and compute power distribution. Modern vehicles boast high-performance CPUs or GPUs (graphics processing units) as the heart of their electrical architecture, handling massive real-time data streams. Modern vehicles feature AI-specific hardware, such as neural processing units (NPUs), to accelerate AI-based tasks.
ADAS applications built on low-level fusion place lower compute power demands on the processors, resulting in lower E/E costs.
Power distribution: Sensor fusion and perception systems employ machine learning and computer vision to deliver environmental models. Such systems place significant power consumption demands on the vehicle. As the automotive industry heads into the future of electric vehicles, power consumption by sensor fusion and perception systems directly affects the vehicle’s range. When compared to object-level fusion, low-level sensor fusion and perception solutions demand lower power consumption. In June 2023, for the first time in the industry, LeddarTech demonstrated performance of a low-level sensor fusion and perception solution (LVF-E) on Texas Instruments’ highly integrated and cost-efficient TDA4VM-Q1 8 TOPS processor.
The ability to run a perception solution on a processor with limited compute power and low electrical power requirements is a breakthrough moment for ADAS developers and E/E architects as it cuts costs and allows E/E architects to divert valuable processing and compute power elsewhere on the vehicle.
Communication: Robust networks like Ethernet and Controller Area Network (CAN) are vital. They enable seamless data exchange between sensors, ECUs and other vehicle components, ensuring data reaches the right destinations swiftly. ADAS applications must perform in real time as most safety and comfort ADAS features are time-sensitive. ADAS features use real-time operating systems (RTOS) to ensure tasks are completed within timeframes. Moreover, to keep ADAS features updated and adaptable, automakers are embracing over-the-air (OTA) updates. This method necessitates a flexible electrical architecture to support remote software updates, ensuring vehicles stay sharp in an ever-evolving landscape.
Wiring and integration: The data from the perception system must be integrated with other E/E systems, such as the vehicle’s control systems and user interfaces, to provide a comprehensive view of the vehicle’s environment. Additionally, the ADAS capabilities of a vehicle are influenced by the sensors onboard the vehicle. The sensors’ placement and quantity directly impact the wiring requirements.
Software/hardware tie-up: Some sensor fusion and perception systems are coupled to the hardware, i.e., their compatibility is limited to specific sensor or processor types. This restrains E/E architects’ design philosophy and places dependencies on sensor fusion and perception providers. Such systems hinder E/E architects as scalability becomes a challenge. Designing E/E platforms when using such solutions is burdensome. LeddarTech’s low-level sensor fusion and perception software, LeddarVision™, is a sensor and processor-agnostic solution that allows E/E architects to design the vehicle, the platform and the vehicle’s software without being limited by its perception solution. Furthermore, as the design philosophy and vehicle’s features evolve, LeddarVision can scale to keep up with the changing needs.
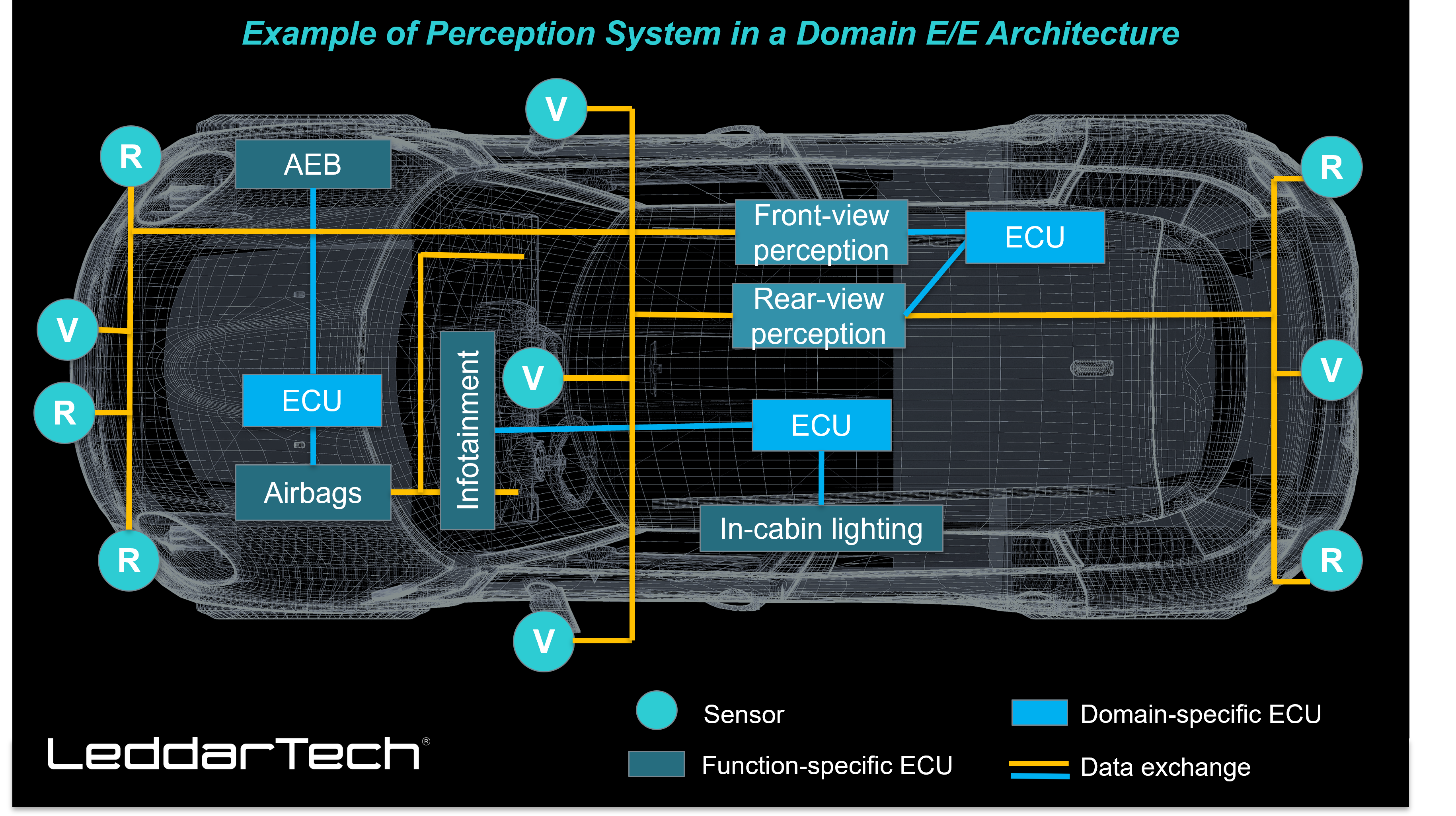
Figure 2: An example of how sensor fusion and perception systems may be implemented in E/E design
Redundancy requirements: Safety and reliability take center stage. The traditional sensor fusion approach requires involving multiple sensors of the same type to ensure redundancy. State-of-the-art low-level fusion generates a perception output even in the event of a degraded or failed sensor. Low-level fusion delivers redundancy using fewer sensors. This influences the electrical architecture, lowering wiring and integration needs.
Data integrity and security: Protecting data integrity is paramount. With vehicles relying on data for life and death decisions, any compromise in data integrity could be catastrophic. Therefore, robust encryption, authentication and intrusion detection mechanisms within the electrical architecture are essential. ADAS features such as automated emergency braking (AEB), lane departure warning (LDW) and blind spot warning (BSW) are life-saving functions. Cybersecurity and data integrity are safety-critical, and E/E architects must consider their impact on ADAS applications.
The electrifying world of sensor fusion and perception systems is a playground of innovation and technical marvels. These technologies are rewriting the rules of vehicle functionality, demanding more computational power, robust communication networks and airtight software integration. The choices that ADAS developers and E/E architects make today will make or break the software-defined vehicle of tomorrow.
Low-level fusion offers many advantages over object-level fusion for ADAS:
With support for V2X communication, LeddarVision is designed not only for today’s production vehicles but also for those of the future.
As the automotive industry charges forward, we can anticipate even more breathtaking advancements in sensor technology and perception systems, further molding vehicles’ electrical and electronic architecture. This revolution promises not just convenience but also a quantum leap in safety and efficiency –a future where vehicles become intelligent companions on the road, helped by advanced driver assistance systems.
This White Paper does not constitute a reference design. The recommendations contained herein are provided “as is” and do not constitute a guarantee of completeness or correctness. LeddarTech® has made every effort to ensure that the information contained in this document is accurate. Any information herein is provided “as is.” LeddarTech shall not be liable for any errors or omissions herein or for any damages arising out of or related to the information provided in this document. LeddarTech reserves the right to modify design, characteristics and products at any time, without notice, at its sole discretion. LeddarTech does not control the installation and use of its products and shall have no liability if a product is used for an application for which it is not suited. You are solely responsible for (1) selecting the appropriate products for your application, (2) validating, designing and testing your application and (3) ensuring that your application meets applicable safety and security standards. Furthermore, LeddarTech products are provided only subject to LeddarTech’s Sales Terms and Conditions or other applicable terms agreed to in writing. By purchasing a LeddarTech product, you also accept to carefully read and to be bound by the information contained in the User Guide accompanying the product purchased.

A high-performance, sensor-agnostic automotive-grade perception solution that delivers highly accurate 3D environmental models using low-level sensor fusion. Its raw data fusion technology detects very small obstacles on the road with better detection rates and fewer false alarms than legacy “object fusion” solutions.
This white paper explains what performance means in a perception system within the context of ADAS and AD and what key performance indicators (KPIs) are used to evaluate it. This paper analyzes how KPIs translate to real-world driving scenarios and also explains concepts such as true positive & negative, false positive & negative, and confusion matrix.
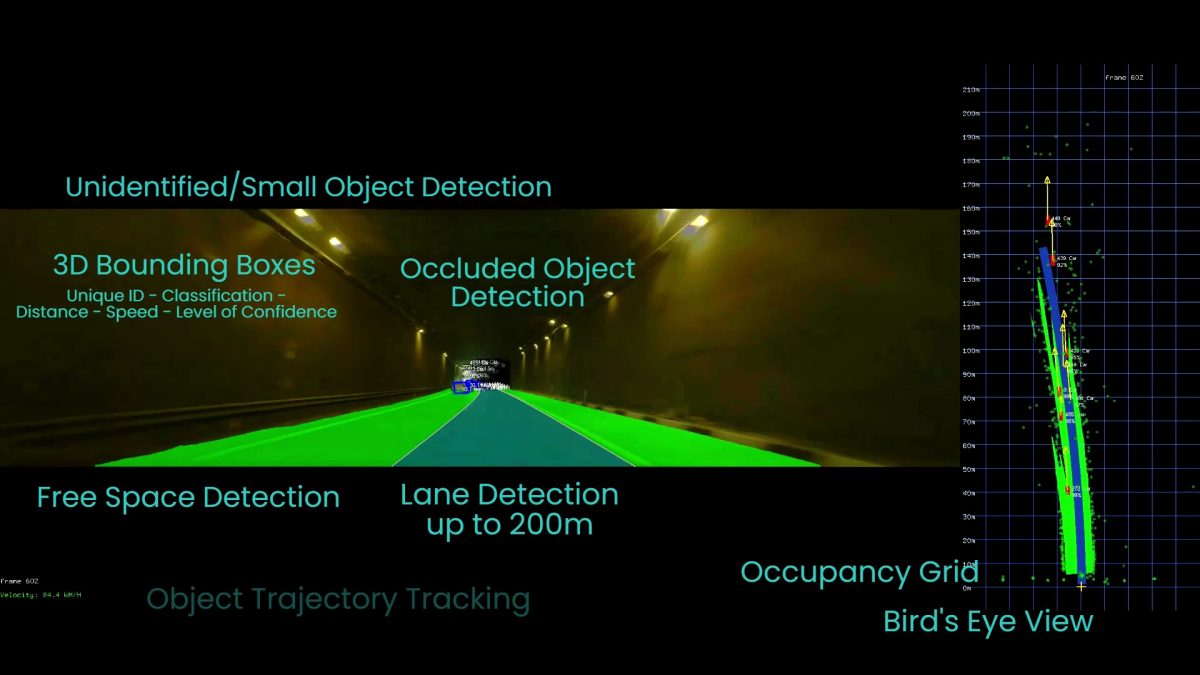
LeddarVision delivers a 3D RGBD environmental model in this short video, demonstrating object detection, tracking and classification abilities of the system.
In this podcast, Abhi Singh and Aviv Goner talk about front-view perception systems that enable applications such as automated emergency braking, adaptive cruise control, lane centering assist and more. They explain the deficiencies in today’s solutions and performance gaps and present solutions to address those gaps, cost-effectively.