Aperçu du produit
Le LVP-H est une solution logicielle complète de fusion et de perception qui prend en charge les applications ADAS de niveau 2/2+ complètes d’aide au stationnement, y compris l’aide au stationnement intelligente (IPA) et l’aide au stationnement à distance (RPA). Reposant sur la technologie de fusion de bas niveau et de perception LeddarVision™, la solution combine de manière optimale les modalités de capteurs et repousse les limites des solutions existantes en termes de performances et de fiabilité, pour une expérience de stationnement sans stress, plus sûre et plus confortable. Le LVP-H augmente la probabilité de détection des stationnements valides à plus de 95 % avec un faible taux de fausses détections dans les ODD et les environnements difficiles, et permet une détection supérieure des objets dynamiques et statiques pour une sécurité accrue, y compris en appui aux scénarios de sécurité avancés de la NHTSA visant l’aide au stationnement intelligente.
Caractéristiques et avantages
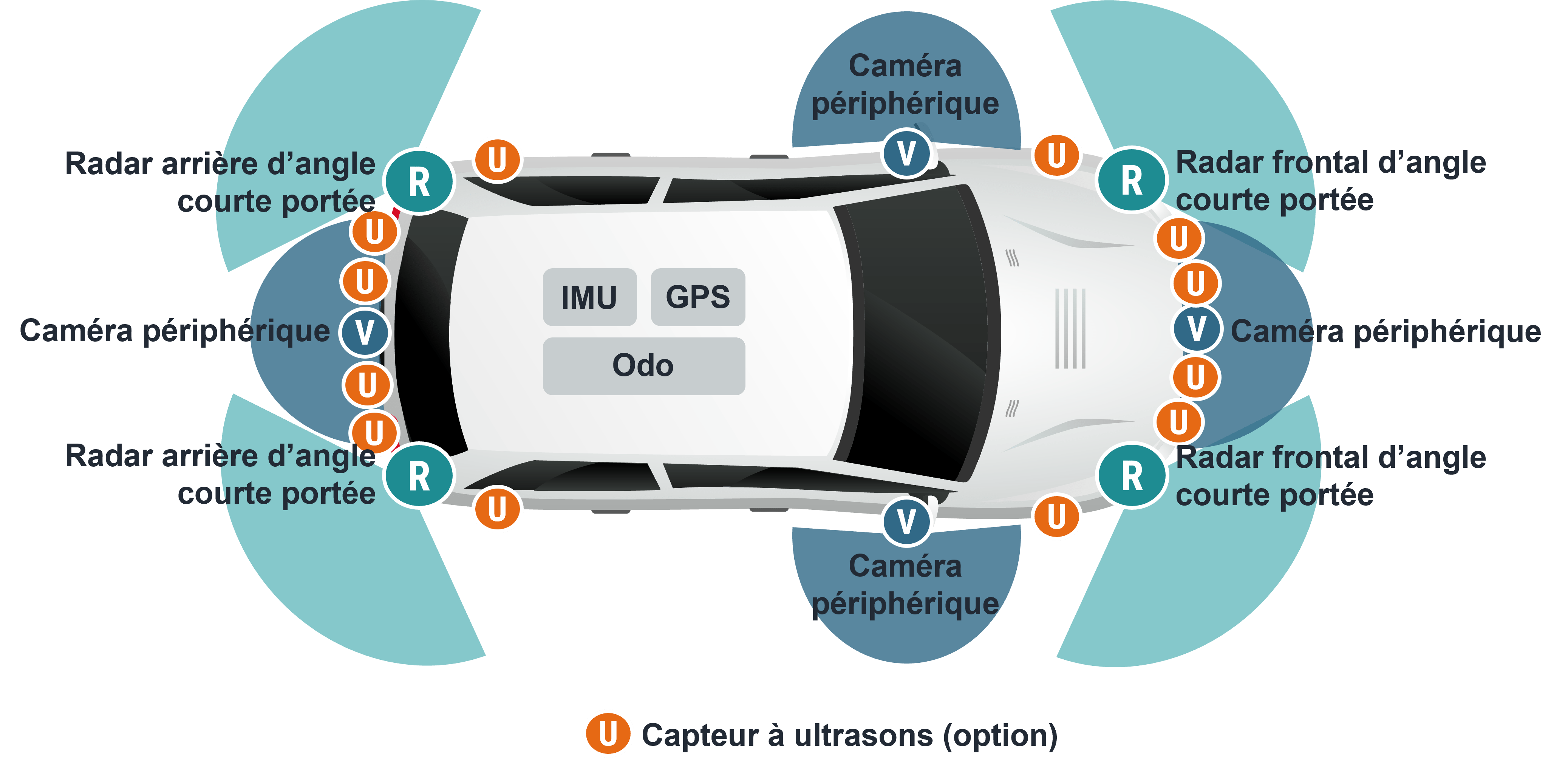
Le LVP-H utilise une configuration de capteurs 4V4R, avec quatre caméras à ultra-grand angle (de type « fish-eye ») à champ de vision de 190° et résolution de 2 Mpx et quatre radars d’angle à courte portée, et accepte jusqu’à 12 capteurs à ultrasons en option. La configuration de capteurs et la solution sont conçues pour prendre en charge une application autonome complète d’aide au stationnement. La mise en œuvre sur un contrôleur de domaine avec accès à toutes les modalités de capteurs permet de maximiser les avantages de la fusion bas niveau pour une performance et une fiabilité accrues.
Le LVP-H constitue une solution complète qui prend en charge l’interface, la calibration et la synchronisation des capteurs, la fusion de données, la détection et la classification des objets dynamiques et statiques, la détection des places de stationnement valides, la modélisation précise de l’environnement statique en 3D, le filtrage et la stabilisation en continu des objets et de l’environnement statique, la détection des attributs du stationnement ainsi que l’auto-localisation par odométrie visuelle (égomouvement), et dote ainsi les applications de stationnement d’un modèle environnemental et d’une API de visualisation de l’interface conducteur exhaustifs.
Famille de produits
Le LVP-H fait partie de la famille de produits LeddarVision, qui appuie l’évolution de l’aide à la conduite avec une feuille de route complète et une offre variée de fonctionnalités. Le LVP-H est également disponible dans une version améliorée, le LVP-H+, qui cible toutes les applications couvertes par le LVP-H et permet en outre la prise en charge d’applications avancées de stationnement automatisé telles que l’aide au stationnement avec apprentissage (TPA), l’aide au stationnement dans un garage (GPA) et l’aide à la marche arrière (RA). La perception et le positionnement étendus comprennent la localisation et la cartographie avancées, la gestion étendue des ODD et l’interface visuelle de conduite améliorée pour répondre aux besoins spécifiques des applications de conduite automatisée à basse vitesse. Le produit LeddarVision Unified (LVU), à venir, fournira un soutien unifié aux applications avancées d’aide à la conduite et de stationnement en combinant les familles de produits à vision périphérique (« Surround », LVS) et de stationnement (LVP) afin de maximiser l’avantage de la tendance à la centralisation de l’architecture E/E, et en consolidant la convergence du traitement centralisé vers un modèle environnemental unique et unifié pour permettre le développement d’applications de façon plus évolutive et à moindre coût.