
Abstract
The Center for Automotive Assessment and Management (CAAM) in early January 2024 released the updated official draft of the China New Car Assessment Program (C-NCAP), replacing the previous C-NCAP evaluation protocol published in 2021. With an eye towards zero fatalities, zero injuries and ultimately zero accidents, the C-NCAP 2024 protocol makes active safety, incorporating advanced driver assistance systems (ADAS), driver monitoring systems (DMS) and road feature recognition (RFR), a key element of the C-NCAP 2024 initiative.
Advanced driving features such as automatic emergency braking (AEB), lane detection, blind spot warning and vulnerable road user (VRU) detection are increasingly important in the new C-NCAP 2024 protocols. This White Paper provides a comprehensive overview of the updates to C-NCAP 2024 protocols, the influence of NCAP on mobility, the role of perception systems in safety and the role that LeddarTech plays in the road safety and NCAP ecosystem.
What Is NCAP and What Role Does It Play in the Automotive Industry?
The New Car Assessment Program (NCAP) is a pivotal vehicle safety evaluation program that assesses new automobile designs for their ability to protect vehicle occupants during accidents and their capability to prevent accidents altogether. Recent advances in ADAS technology have extended the reach of NCAP to include testing protocols that protect not only vehicle occupants but also vulnerable road users, such as pedestrians and bicyclists. Established initially in the United States in 1979 by the National Highway Traffic Safety Administration (NHTSA), NCAP has become an influential global benchmark, inspiring similar programs in Europe, Asia, Latin America and Australasia.
At its core, NCAP provides consumers with vital information on new vehicles’ safety features and crashworthiness. This is achieved through a series of rigorous tests, including frontal and side impact tests, and, increasingly, evaluations of ADAS that contribute to active safety. Such tests are designed to simulate real-world crash scenarios that could result in serious injuries or fatalities, thus gauging a vehicle’s effectiveness in preventing or mitigating the effects of such incidents.
Vehicles are rated on a scale, typically from one to five stars, with five stars representing the highest level of safety. This rating system not only aids consumers in making more informed purchasing decisions but also incentivizes manufacturers to enhance the safety features of their vehicles.
Moreover, the evolution of NCAP reflects the advancements in automotive technology and changing road safety paradigms. For instance, recent updates in various national NCAPs have started to include assessments of pedestrian protection, post-collision safety and the effectiveness of electronic stability control (ESC) systems.
As vehicle technology evolves, NCAP continues to adapt its assessment methods to ensure that new and emerging technologies, such as autonomous driving (AD) features, are thoroughly evaluated for safety. This ongoing development highlights NCAP’s role in promoting higher safety standards, thereby reducing road traffic injuries and fatalities globally.
Overview of China’s New Car Assessment Program
C-NCAP was officially launched in 2006 by the China Automotive Technology and Research Center (CATARC), taking into account local traffic accident studies, road conditions, driving patterns and the technological and economic development of the industry and the country. Since C-NCAP’s inception, it has been modified six times, with updates released in 2009, 2012, 2015, 2018, 2021 and 2024. Today, vehicle passive safety technology is becoming more and more refined, and active safety technology has also entered a greater stage of development. The integration of passive and active safety technology will constitute a universal safety protection system for vehicle occupants and VRUs. C-NCAP 2024 evaluations can be broken down into three main sections:
1. An occupant protection section that includes:
a. Vehicle crash test
b. Child protection static evaluation test
c. Low-speed rear-end collision neck protection test
d. Virtual evaluation test
2. A vulnerable road user (VRU) protection section that includes:
a. Head-shaped test
b. Leg-shaped test
c. AEB-VRU test
3. An active safety section that includes:
a. ADAS
i. AEB – car-to-car (C2C)
ii. AEB false reaction
iii. Lane keep assist (LKA)
iv. Emergency lane keeping (ELK)
v. Lane departure warning (LDW)
vi. Intelligent speed limit system (ISLS)
vii. Blind spot detection (BSD)
viii. Door opening warning (DOW)
ix. Rear cross-traffic alert (RCTA)
b. Driver monitoring system (DMS)
c. Road feature recognition (RFR)
i. Traffic sign recognition (TSR)
Passive Safety in C-NCAP 2024
C-NCAP’s first and a majority of second sections of testing and evaluation protocols can also be classified as passive safety, where a vehicle’s mechanical engineering and design provide safety to the vehicle occupants. One way passive safety protects vehicle occupants is by designing the vehicle in a manner that absorbs the energy of the crash. Under the occupant protection section in C-NCAP 2024, vehicles undergo:
1. Frontal impact tests: C-NCAP conducts frontal crash tests by propelling a vehicle at a certain speed into a deformable or rigid barrier, covering a part or whole of the front of the vehicle on the driver’s side. This test simulates a frontal collision, common in real-world accidents, and tests the vehicle’s ability to protect occupants through crumple zones and restraint systems. Choosing a deformable barrier helps mimic the interaction between vehicles of similar mass and structure in an accident. Some examples of frontal impact tests required in C-NCAP 2024 are:
a. Frontal 100% overlap rigid barrier crash test, wherein the test vehicle impacts a fixed rigid barrier with 100% overlap at a speed of 55-56 km/h.
b. Frontal 50% overlap moving progressively deforming barrier crash test, wherein the test vehicle and the deformation barrier collide at a speed of 49-51 km/h each. The overlap width of the collision between the vehicle and the deformation barrier shall be within a range of 50% of the vehicle width ± 25 mm.
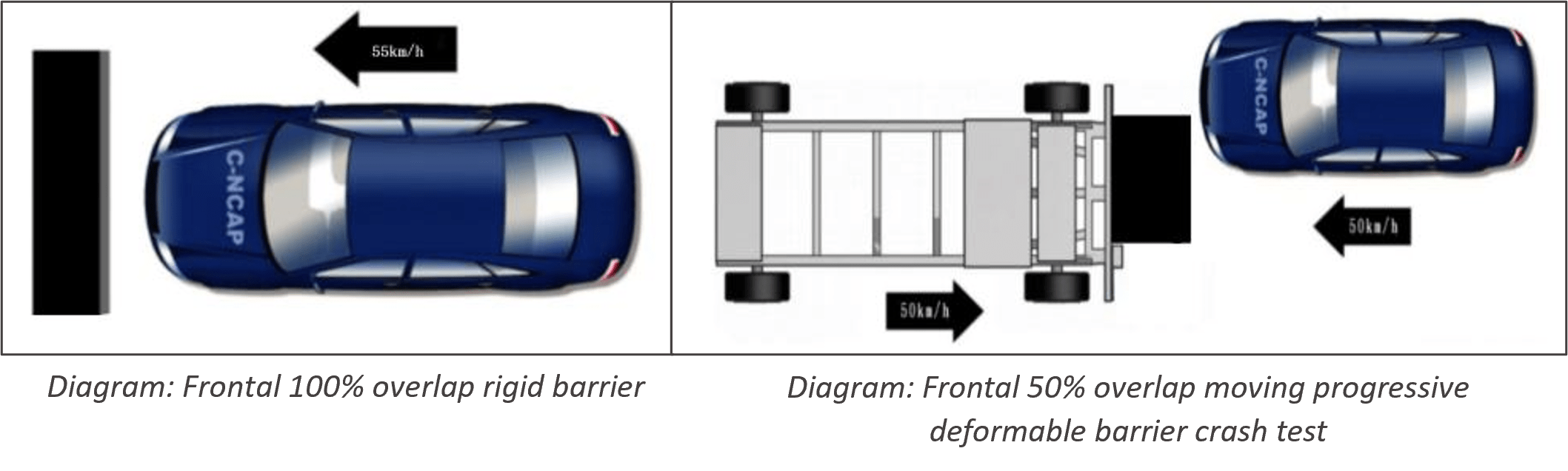 Source: C-NCAP 2024 evaluation protocol. Image used as-is.
Source: C-NCAP 2024 evaluation protocol. Image used as-is.
2. Side impact tests: The side impact barrier test simulates a vehicle being struck on the side at an intersection by another vehicle. The pole test, involving a narrow object striking the vehicle’s side, assesses the performance of side airbags and the vehicle’s structural integrity in protecting the occupants’ head and torso areas. Side impact tests are crucial for assessing the protection against head injuries when the impact area does not allow for large deformations to absorb the crash energy. Section 3.1.1.2 of the China NCAP Management Regulations 2024 details the side impact test protocol wherein a deformable energy-absorbing barrier is driven perpendicular to the test vehicle with the centerline of the mobile barrier aligned with the test vehicle’s R point 200 mm backward position and made to collide with one side of the vehicle at 60-61 km/h speed. The test vehicle and dummies are subsequently inspected for damage, and a safety rating is given accordingly. A vehicle’s R-point (aka seating reference point) refers to the intersection point of the midplane of the seat.
3. Rollover tests: Rollover tests are not specifically highlighted in all NCAP protocols, including C-NCAP’s publicly detailed methodologies. However, the strength of the vehicle roof might be assessed indirectly through other structural integrity tests. The focus on rollover protection can be implicit within the overall vehicle safety ratings, influenced by factors such as vehicle design and center of gravity studies.
4. Whiplash protection in rear impacts: C-NCAP includes assessments of whiplash protection in rear impacts, examining the design and effectiveness of the vehicle’s seats and head restraints. These tests are essential for evaluating how well the vehicle protects occupants against neck injuries, which are particularly common in rear-end collisions. C-NCAP 2024 requires a low-speed rear-end collision neck protection test in which the test vehicle’s driver seat and restraint system are modeled after the original vehicle structure and installed on a mobile skid. The mobile skid is launched with a specific acceleration waveform to simulate the process of rear collision. A dummy is placed on the seat to evaluate the protection of the driver’s seat head restraint on the occupant’s neck by measuring the neck injury during the rear collision.
Active Safety in C-NCAP 2024
Active safety refers to the suite of technologies in a vehicle designed to prevent accidents by assisting or alerting the driver to potential hazards. These systems function before a crash occurs, distinguishing them from passive safety features like airbags and seat belts, which mitigate injury during and after an accident.
In the context of C-NCAP, active safety features are crucial components that are evaluated to ensure the safety performance of vehicles sold in China. C-NCAP’s assessment includes testing and rating technologies such as ESC, anti-lock braking systems (ABS), DMS, ADAS –like lane departure warning and automatic emergency braking– and RFR. By rigorously assessing these features, C-NCAP enhances consumer awareness of vehicle safety capabilities and drives manufacturers to integrate advanced active safety technologies, significantly contributing to road safety and reducing accident rates across China. Below is a list of the ADAS features tested in C-NCAP 2024:
1. Automatic emergency braking: When the AEB system detects an imminent collision with another vehicle, pedestrian or obstacle, it triggers a warning to the driver. If the driver does not respond adequately to the threat by braking or if the situation escalates to a critical level, the AEB system will automatically apply the brakes to slow down or stop the vehicle, aiming to avoid the collision or lessen the impact force. C-NCAP 2024 mandates testing of various types of AEB systems:
a. AEB-pedestrian: In this protocol, the vehicle’s ability to automatically emergency brake upon detecting a pedestrian is tested. The vehicle is made to approach the pedestrian at various speeds ranging from 10 km/h to 80 km/h, and at various angles ranging from directly behind the pedestrian to while making right or left turns. The testing protocol also tests the AEB system’s ability to react to occluded pedestrians that might come in the vehicle’s path and are also hidden from the test vehicle driver’s view.
The AEB-pedestrian testing protocol goes a step further in ensuring VRU protection by testing the AEB system’s performance in detecting not only adults but also children. Additionally, the AEB system is tested for both day and night conditions, pushing the system’s limits.
b. AEB–two-wheelers: This protocol tests AEB for its effectiveness in avoiding or mitigating collisions with two-wheelers. AEB–two-wheeler testing incorporates multiple scenarios wherein the test vehicle speed, angle of approach to the two-wheeler and visibility are changed. A few of the testing protocols (which are also similar in AEB-pedestrian) are:
i. CBNAO-50 (car-to-electric bicyclist near side adult with obstruction 50%), wherein the vehicle approaches the near side of the electric bicycle without braking and wherein 50% of the front vehicle width will collide with the bike without any AEB system. The vehicle is tested at 20 km/h, 40 km/h and 60 km/h, while the e-bike approach speed is 15 km/h.
ii. CSFAO-50 (car-to-scooter farside adult with obstruction 50%), wherein the scooter approaches the vehicle perpendicularly at 20 km/h and would collide with 50% of the frontal vehicle width if no AEB system activates. The vehicle is tested at speeds of 20 km/h, 40 km/h and 60 km/h.
iii. CBLA-25 (car-to-electric bicyclist longitudinal adult with overlap 25%), wherein the vehicle approaches a longitudinally traveling e-bike in front of it without brakes and the e-bike and vehicle have a 25% overlap. The vehicle is tested at approach speeds of 20 km/h, 40 km/h, 60 km/h and 80 km/h while the e-bike travels at 15 km/h.
c. AEB-Car to Car (AEB – C2C): Similar to AEB-Two-wheelers and AEB-Pedestrian, AEB-Car-to-car assesses the vehicle’s ability to avoid or mitigate a collision between the vehicle being tested by applying automatic emergency braking and another vehicle.
d. AEB False Reaction: This protocol, unique at this point to C-NCAP 2024, tests the number of times AEB was incorrectly triggered. The evaluation criterion for AEB fault-trigger test case is whether the function is fault-triggered: If neither AEB nor FCW (Forward Collision Warning) function is triggered, the test is considered “passed”. If either AEB or FCW function is triggered, it is considered “failed.” In 10 scenes, if the system passes the test 8 or more times, it is awarded the full score. If there are less than 8 passing scenes, the score will be calculated based on the ratio of passing scenes.
2. Lane Keeping Assist System (LKA): The LKA system monitors the relative position of the vehicle and the lane line in real-time, and intervenes in the lateral motion control of the vehicle when it is about to go beyond the lane line, to assist the driver in maintaining the vehicle in the original lane. For models equipped with the LKA system, the solid and dashed line deviation scenarios are conducted respectively.
3. Emergency Lane Keeping (ELK): The Emergency Lane Keeping (ELK) system monitors the relative position of the vehicle to the lane line in real-time and intervenes in the lateral motion control of the vehicle to assist the driver in maintaining the vehicle in the original lane when it deviates into the adjacent lane and conflicts with other road participants. C-NCAP 2024 mandates testing of dashed line deviation scenarios for ELK systems.
4. Lane Departure Warning (LDW): The LDW system monitors the vehicle’s driving status in the lane in real-time and sends a warning message in case of unwanted lane departure.
5. Blind Spot Detection (BSD): The blind spot monitoring system (BSD) monitors the blind spot of the driver’s field of vision in real time and sends out prompts or warning messages when other road users appear in their blind spot.
6. Intelligent Speed Limiting System (ISLS): Intelligent Speed Limit System (ISLS) automatically obtains the speed limit information that the vehicle should comply with under the current conditions and monitors the vehicle’s traveling speed in real-time by sending out a warning message when the vehicle’s traveling speed does not comply with the minimum speed limit or is about to exceed the posted limit.
7. Rear Cross Traffic Alert (RCTA): The Rear Crossing Traffic Alert (RCTA) system monitors other road users approaching laterally at the rear of the vehicle in real-time when the vehicle is backing up and sends out a warning message when a collision hazard may occur.
8. Door Open Warning (DOW): The DOW system monitors other road users to the side and rear of the vehicle when the door is about to be opened in a parked state and sends out a warning message when a collision hazard may occur due to the door opening.
For the vehicle models equipped with LDW, BSD, ISLS, RCTA, and DOW systems, it is determined whether the system on the vehicle has the required performance by reviewing the performance test report issued by a qualified third-party testing organization.
Driver Monitoring Systems in China NCAP 2024
A Driver Monitoring System (DMS) is a sophisticated technology integrated into vehicles to assess the driver’s alertness and attention to the driving task. The DMS utilizes sensors, cameras, and algorithms to detect signs of driver fatigue, distraction, or impairment by continuously monitoring aspects such as eye gaze, head position, and blink rate. When a potential lapse in attention is detected, the system alerts the driver, thereby helping to prevent accidents caused by inattention.
The increasing discussion about DMS in the automotive industry is driven by rising concerns over road safety and the growing recognition of distracted driving as a significant contributor to traffic accidents. As vehicles become more equipped with automated features, ensuring that drivers remain engaged and ready to take control is paramount.
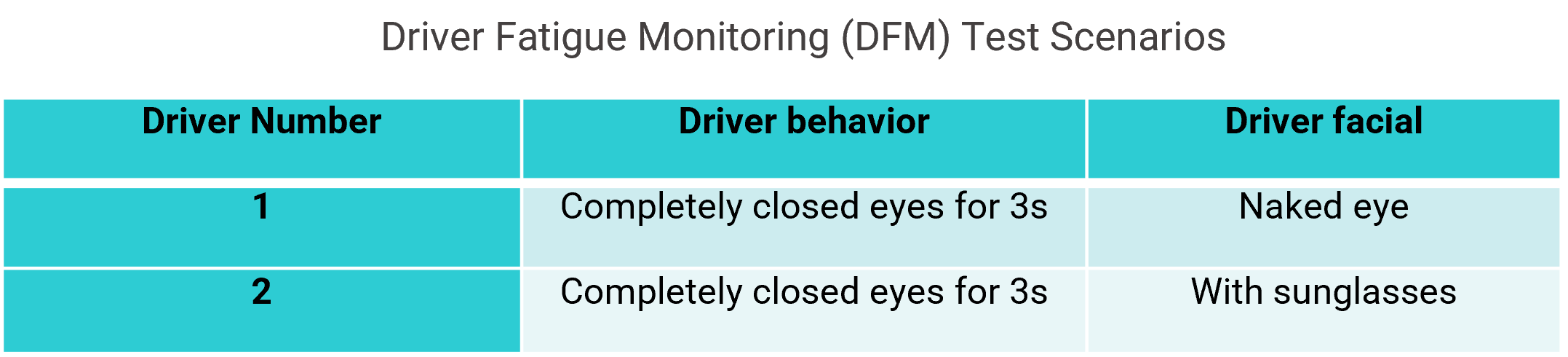
In China, the importance of DMS is recognized in China’s New Car Assessment Protocol (C-NCAP) and the latest version released in 2024 requires testing for driver fitness monitoring (DFM) and driver attention monitoring (DAM). Driver fitness and attention monitoring are related but focus on different aspects of driver condition. Driver fitness monitoring assesses the driver’s overall physical and cognitive capability to operate a vehicle, evaluating factors such as potential medical incapacities, fatigue, or substance impairment. It focuses on the driver’s health and long-term ability to drive safely. The DFM test in C-NCAP 2024 measures the driver’s height, eyelid gap and other parameters. The driver is then tasked to complete the driver fatigue test and the system is tasked to evaluate the driver’s fitness to drive.
In contrast, driver attention monitoring specifically targets the driver’s current level of alertness and engagement with the driving task. It uses sensors and cameras to analyze eye movement, head position, and other indicators to detect immediate distractions or signs of drowsiness. This system is more concerned with moment-to-moment vigilance rather than overall health or fitness.
Perception Systems in ADAS
Perception systems are crucial components of Advanced Driver Assistance Systems (ADAS), playing a pivotal role in enhancing the functionality and reliability of these technologies. The performance of ADAS functions heavily depends on the accuracy, range, and resolution of these perception systems. For example, automatic emergency braking relies on sensors to detect obstacles in the vehicle’s path, and the precision of this detection directly affects the system’s ability to initiate braking at the correct moment to avoid collisions. Similarly, adaptive cruise control uses radar to maintain a safe following distance from the vehicle ahead, adjusting speed based on the real-time data received about the speed and distance of the leading vehicle.
Furthermore, lane-keeping assist systems require high-resolution cameras to read road markings accurately and ensure the vehicle stays within its lane. The effectiveness of these systems can be compromised in poor visibility conditions, such as fog or heavy rain, highlighting the importance of robust and reliable perception technologies.
Perception systems’ integration and processing capabilities also determine how well various ADAS functions can work together to provide a cohesive driving experience. This integration enables the vehicle to make more informed decisions, akin to situational awareness in human drivers, thereby increasing the safety and efficiency of driving.
LeddarTech Enables High-Performing Active safety ADAS
LeddarTech is a global software company founded in 2007 and headquartered in Quebec City, with additional R&D centers in Montreal and Tel Aviv, Israel. It provides innovative AI-based low-level sensor fusion and perception ADAS and AD software technology that generates a comprehensive 3D environmental model from various sensor types (camera, radar and LiDAR) and configurations. As highlighted in the previous section, range, accuracy, occluded object detection & classification, VRU detection and performance in adverse conditions play a critical role in ADAS performance. The following points explain LeddarTech’s performance on each of the parameters and LeddarTech’s cost advantages:
1. Range: LeddarTech’s AI-based low-level sensor fusion and perception technology, LeddarVision™, extends the effective perception range. Compared to traditional and prevalent object-level fusion, LeddarVision can up to double the effective range using the same sensor set. The LeddarVision Front-View – Entry (LVF-E)software stack doubles the supported object detection range to 150 m using one 1- 2 Mpx front camera and two short-range front corner radars. Similarly, the LeddarVision FrontView – High (LVF-H) and LeddarVision Surround-View – Premium (LVS-2+) extend the object detection range to over 200 meters. Early detection is crucial for vehicles to achieve a 5-star rating in new car assessment programs (NCAP), especially for AEB scenarios.
2. Accuracy: False alarms within the context of perception systems refer to the perception output incorrectly concluding an object’s presence (or absence). False alarms are critical key performance indicators and cause maloperation. The performance of AEB false reaction, as mandated in C-NCAP 2024 and explained in a previous section, is directly influenced by the perception system’s false alarm handling. LeddarVision and its derivative products (LVF-E, LVF-H, LVS-2+ and LVP-H) are tuned for better recall and precision, resulting in fewer false alarms. This improvement means that ADAS developers can be more confident in their systems’ accuracy and safety performance. The precision vs. recall graph below shows LeddarVision’s high performance in reducing false alarms.
Another highlight of LeddarTech’s AI-based low-level sensor fusion and perception solution is its ability to detect small and separate objects at large distances. The ability to detect small objects such as debris and animals enhances the performance of AEB and other collision avoidance systems. Additionally, it improves overall situational awareness, enabling the vehicle and driver to make better, more informed driving decisions. Similarly, the ability of ADAS systems to distinguish between two separate objects critically enhances their performance by enabling precise decision-making and action. This differentiation is pivotal for functions like adaptive cruise control and AEB, where the system must accurately identify and react to multiple vehicles, pedestrians, or nearby obstacles. For instance, a system that can separately identify two closely spaced vehicles can more effectively maintain safe following distances, maneuver around obstacles, or apply brakes to prevent collisions.
3. VRU and occluded object detection: AEB for VRU is a recent addition and a critical component in C-NCAP 2024. In addition, Euro NCAP 2025 and NHTSA too mandate vehicle manufacturers to demonstrate AEB performance for VRUs. LeddarVision, LVF-E, LVS-2+ and LVP-H deliver superior object detection performance that extends to occluded VRUs and vehicles, providing early warning in NCAP-tested scenarios (e.g., occluded cyclist/pedestrian tests).
4. Adverse condition: LeddarVision demonstrates robust performance in adverse conditions, detecting, tracking and classifying objects under direct sunlight, at night or in dimly lit areas, in rain, snow, fog and dusty environments when sensors may be degraded or rendered inoperable. Each sensor (camera, radar, LiDAR) has limitations. The camera typically performs poorly in adverse conditions such as low light, dusty environments, rain, fog or snow. Similarly, the resolution of radar and LiDAR at higher distances poses a challenge. A perception solution based on object-level fusion suffers from the individual sensor weaknesses as it fuses the output of the individual sensor perception output. However, low-level fusion solutions fuse the raw data of all sensors before applying perception algorithms to the resulting comprehensive dataset. This approach allows low-level sensor fusion and perception solutions, such as LeddarVision, to mitigate individual sensor weaknesses by leveraging other sensors’ strengths.
Furthermore, low-level fusion and perception solutions do not suffer from sensor contradictions. In adverse conditions, while the camera might fail to detect an object, the radar can still identify it at the same location. Perception systems based on object-level fusion must decide whether the object exists and which sensor is providing the correct output. Since LeddarVision fuses raw sensor data, it eliminates these contradictions. Another update on C-NCAP 2024 testing is the addition of traffic sign recognition. LeddarVision and its derivative products (LVF-E, LVF-H, LVS-2 + and LVP-H) implement a premium fusion and perception, positioning and prediction stack that handles continuous object tracking and stabilization, free space detection, road modeling, comprehensive traffic sign detection, vehicle odometry interface and more.
Enabling Cost-Effective Active Safety ADAS
LeddarTech’s cost-effectiveness can be realized in three ways by automotive Tier 1 suppliers and vehicle manufacturers. These three ways are:
1. Lower system cost: LeddarTech reduces the overall perception system cost by requiring fewer sensors compared to object-level fusion solutions. For instance, while most surround-view solutions today utilize an 11-camera and 5-radar configuration, the LeddarVision Surround-View (LVS-2+) employs a 5-camera and 5-radar configuration. Since each vehicle equipped with front-view or surround-view perception is fitted with multiple sensors, savings per vehicle increase rapidly across the millions of vehicles that automotive original equipment manufacturers (OEMs) produce. As per LeddarTech’s internal study and estimates based on available market information, LeddarTech’s front-view solution (LVF-E) and surround-view solution (LVS-2+) are 44% and 48% more cost-effective than their counterpart camera-centric perception solutions.
2. Lower long-term costs: LeddarTech’s solutions are scalable, meaning that the same platform can enable Level 2 ADAS and then be scaled to higher levels of automated driving. This single architectural approach reduces rework efforts with sensor changes and efficiently scales computational power with sensor additions required for higher levels of ADAS and AD. Additionally, it drastically reduces the R&D time, effort and financial outlay for automotive Tier 1s and OEMs.
3. Indirect cost savings: Reduced sensor requirements indirectly impact system cost through reduced processing cost and heat management and more energy savings. Additionally, fewer sensors reduce the wiring requirements and vehicle weight, resulting in lower electrical/electronic (E/E) costs.
Conclusion
The dynamics of the Chinese market, particularly in the automotive sector, are undergoing significant transformations. Chinese consumers demonstrate a strong interest in advanced driver assistance systems (ADAS) and autonomous driving (AD) technologies. The industry is observing rapid development timelines and a swift pace of change in consumer behavior, with a noticeable openness to adopting new vehicle technologies. As a result, Chinese OEMs are introducing new vehicle tech at an increased frequency.
Many factors influence the increased adoption of ADAS features on vehicles. In China and globally, the industry is mandated by governmental legislation such as China NCAP 2024, Euro NCAP 2025, GSR 2022 and NHTSA’s NCAP. Powered by technological advances, active safety has become the key instrument in avoiding or mitigating collisions and continues to gain significance in regulatory and consumer requirements. Each cycle of NCAP update introduces more stringent testing of existing safety ADAS features and/or the introduction of new active safety features. ADAS technologies offer functionalities such as automatic emergency braking, lane departure warning and blind spot detection, aligning with these regulatory requirements. OEMs are also addressing the need to have competitive differentiation by adding more ADAS features, which helps reduce the costs of such technology, making it more accessible across practically all vehicle models.
LeddarTech’s AI (artificial intelligence)-based low-level sensor fusion and perception technology and products facilitate high-performing, cost-effective, scalable and flexible ADAS that enables 5-star safety rating. LeddarTech is delivering effective solutions that lower adoption costs for vehicle buyers and increase their trust and confidence in ADAS technologies, paving the way for enhanced ADAS feature usage in the future. Furthermore, Chinese and global manufacturers emphasize cost reduction and accelerated time-to-market strategies. These approaches facilitate higher and quicker consumer adoption rates for ADAS and AD. To support this rapid development, companies like LeddarTech are collaborating with industry giants such as Texas Instruments and Arm and local Chinese hardware producers like Black Sesame Technologies.
This White Paper does not constitute a reference design. The recommendations contained herein are provided “as is” and do not constitute a guarantee of completeness or correctness. LeddarTech® has made every effort to ensure that the information contained in this document is accurate. Any information herein is provided “as is.” LeddarTech shall not be liable for any errors or omissions herein or for any damages arising out of or related to the information provided in this document. LeddarTech reserves the right to modify design, characteristics and products at any time, without notice, at its sole discretion. LeddarTech does not control the installation and use of its products and shall have no liability if a product is used for an application for which it is not suited. You are solely responsible for (1) selecting the appropriate products for your application, (2) validating, designing and testing your application and (3) ensuring that your application meets applicable safety and security standards. Furthermore, LeddarTech products are provided only subject to LeddarTech’s Sales Terms and Conditions or other applicable terms agreed to in writing. By purchasing a LeddarTech product, you also accept to carefully read and to be bound by the information contained in the User Guide accompanying the product purchased.



