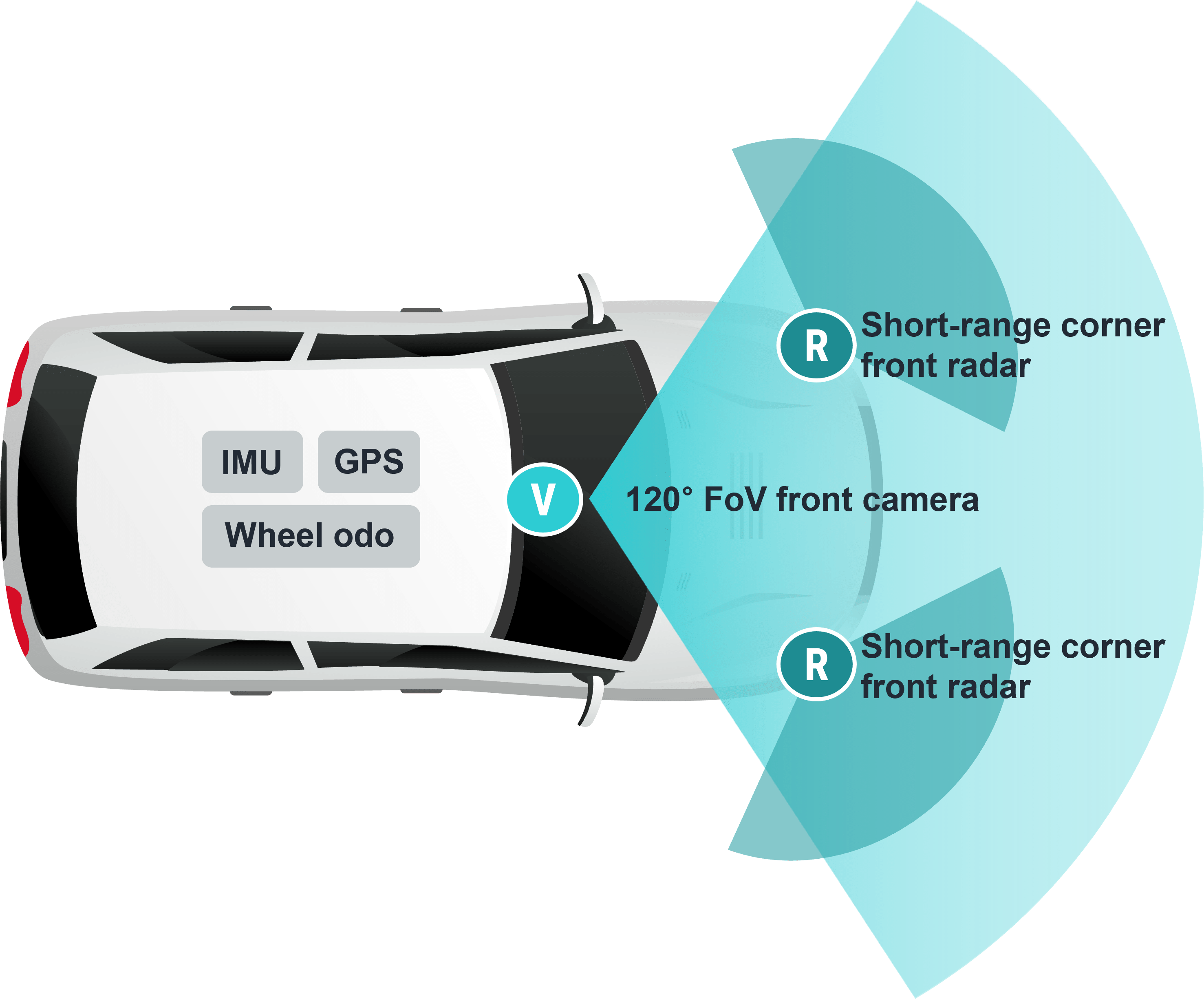
LVF-E is a comprehensive front-view fusion and perception stack for base ADAS L2/L2+ highway assist and 5-star NCAP 2025/GSR 2022. LeddarTech’s AI based low-level fusion (LLF) technology pushes the performance envelope, doubling the effective range of the sensors and enabling, for the first time, a solution processing a single 120-degree front camera and two short-range front corner radars in a 1V2R configuration. Low-cost sensing, together with efficient implementation on Texas Instruments’ TDA44VE processor, achieves the lowest system cost for L2/L2+ base ADAS.
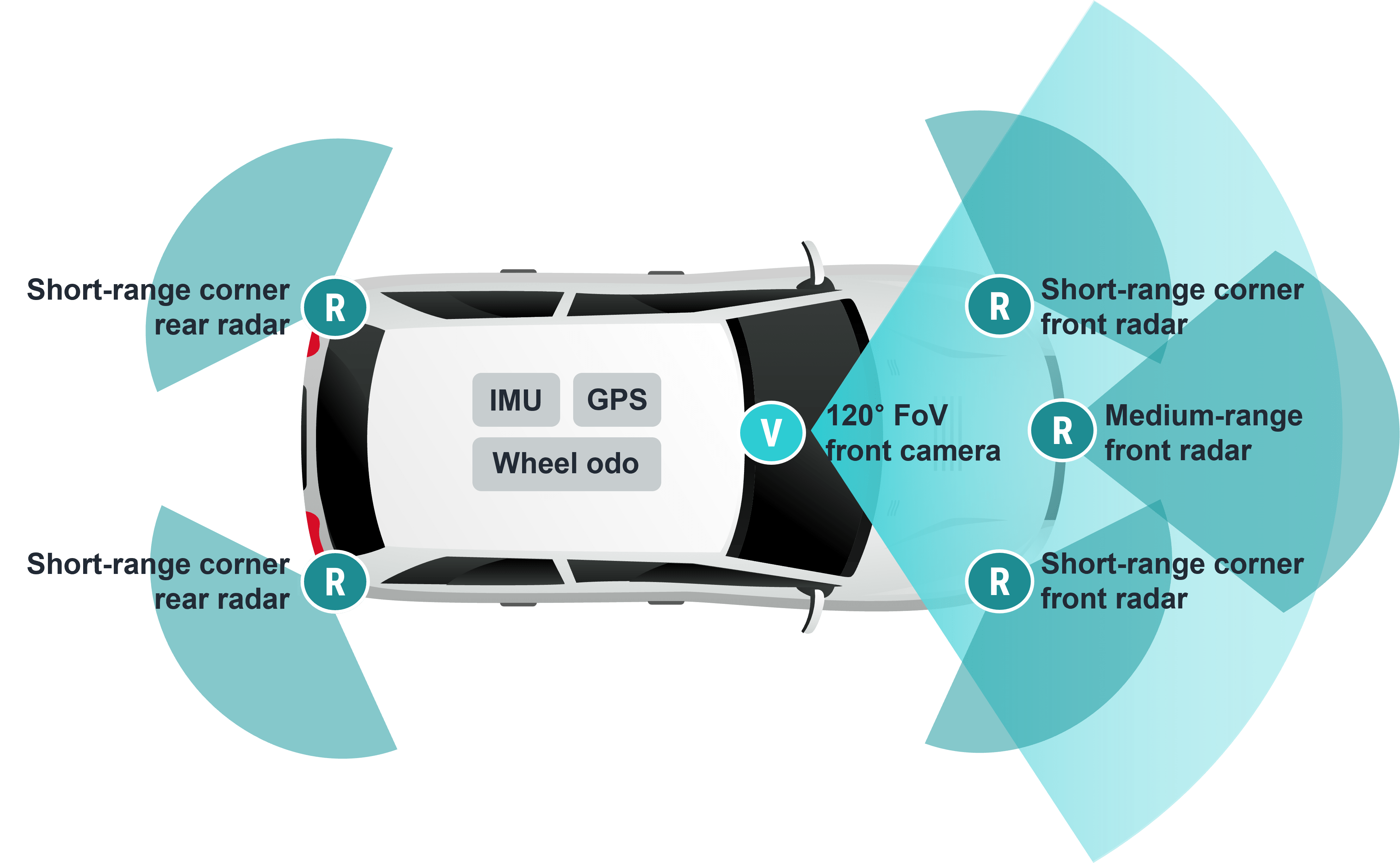
With sensor configuration extended to 1V5R based on a single 120-degree camera, single front medium-range radar and four short-range corner radars, the LVF-H stack extends the perception support to highway assist applications, including 160 km/h adaptive cruise control, 200-meter range and semi-automated lane change. It also enhances the NCAP 2025 support for overtaking/reverse/dooring scenarios. Furthermore, low-cost sensing achieves economical front-view L2/L2+ premium ADAS.
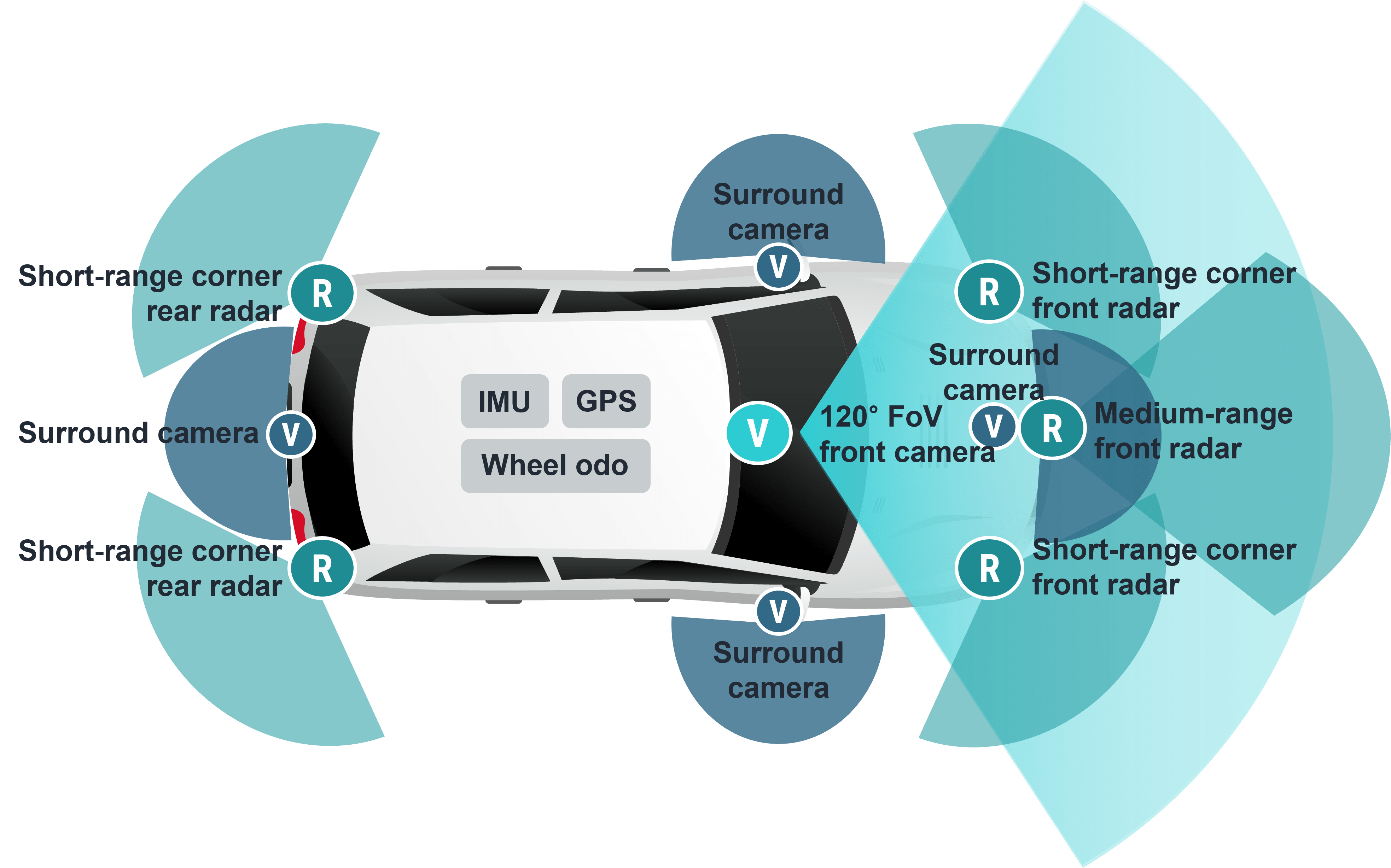
The LVS-2+ is a comprehensive fusion and perception software stack supporting full surround-view L2/L2+ ADAS highway assist and 5-star NCAP 2025/GSR 2022 safety applications. LeddarVision™ AI based low-level fusion (LLF) and perception technology enables the implementation of full surround-view to extended front-view ADAS utilizing a single architectural approach, efficiently scaling computational power with sensor additions and reducing rework efforts with sensor changes. Based on LeddarVision architecture, LVS-2+ efficiently extends the LVF base front-view product family 1VxR sensor configuration to a 5V5R configuration, enhancing support to TJA and HWA applications, enabling automated lane changes, overtaking and extended speed range adaptive cruise control (ACC).
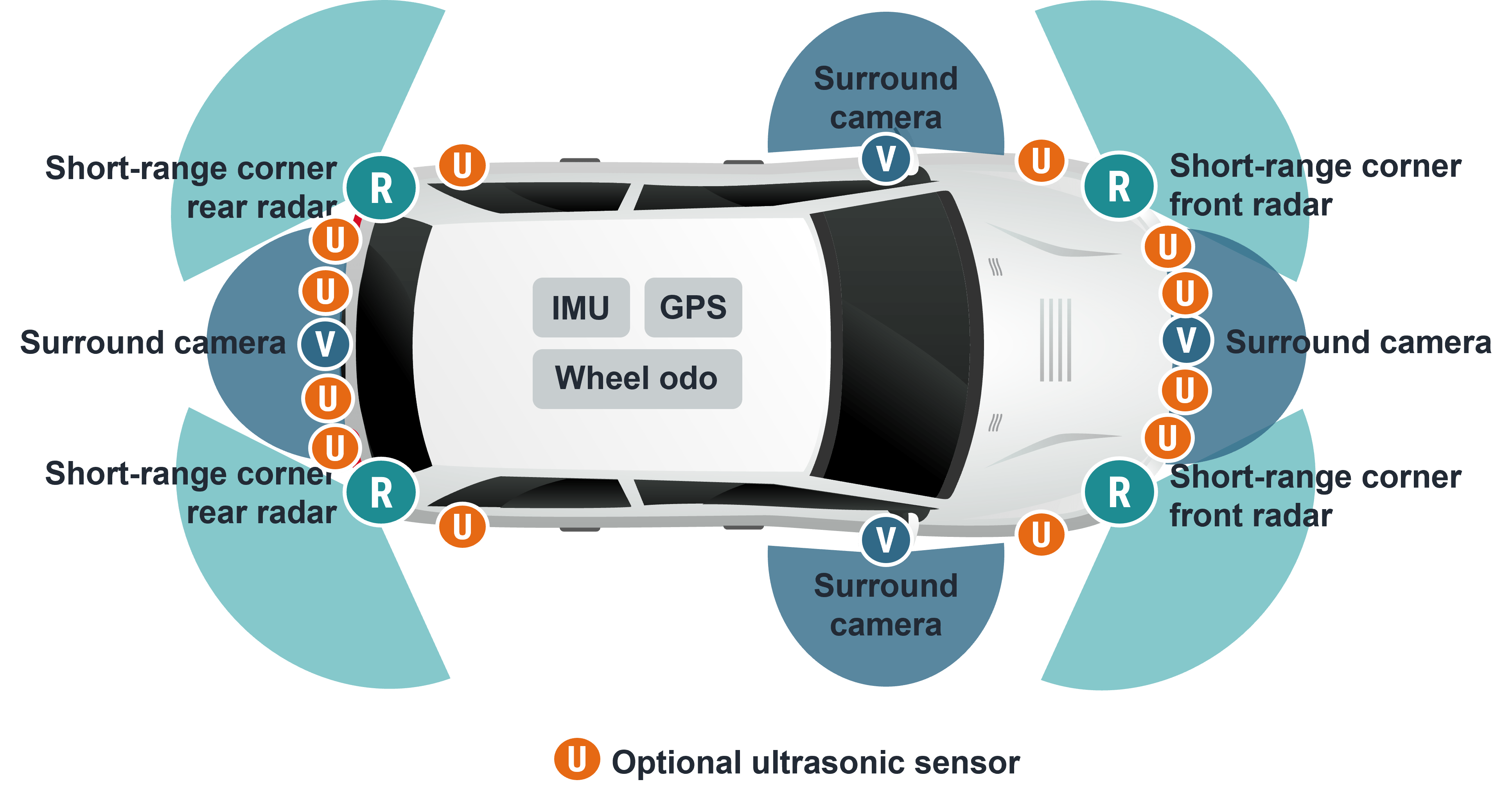
LVP-H is a comprehensive fusion and perception software stack supporting ADAS L2/L2+ parking assist applications, including intelligent parking assist (IPA) and remote parking assist (RPA). LVP-H enhances valid parking detection probability to over 95% with low false detections in challenging ODDs and environments and provides superior dynamic and static object detection for enhanced safety, including support to advanced NHTSA IPA safety scenarios. LVP-H utilizes a 4V4R sensor configuration, having four fish-eye cameras with 190° FoV and four short-range corner radars with support to extension of up to 12 ultrasonic sensors.

LeddarVision is a high-performance, sensor-agnostic automotive-grade solution that delivers highly accurate 3D environmental models. This scalable software supports all SAE autonomy levels by applying AI and computer vision algorithms to fuse raw data from sensors employed in L2 to L5 applications.

In December 2022, Ficosa and LeddarTech announced the signing of a development and commercialization agreement for the development of a smart automatic parking assistant. This 8-min video, featuring Ficosa and LeddarTech, lifts the lid on the development and commercialization agreement.

This White Paper explains the growing role of ADAS in NCAP. It delivers an overview of the scenarios, conditions and environments in which testing is performed and the role that perception systems must play for vehicle manufacturers to stay ahead of the NCAP requirements.