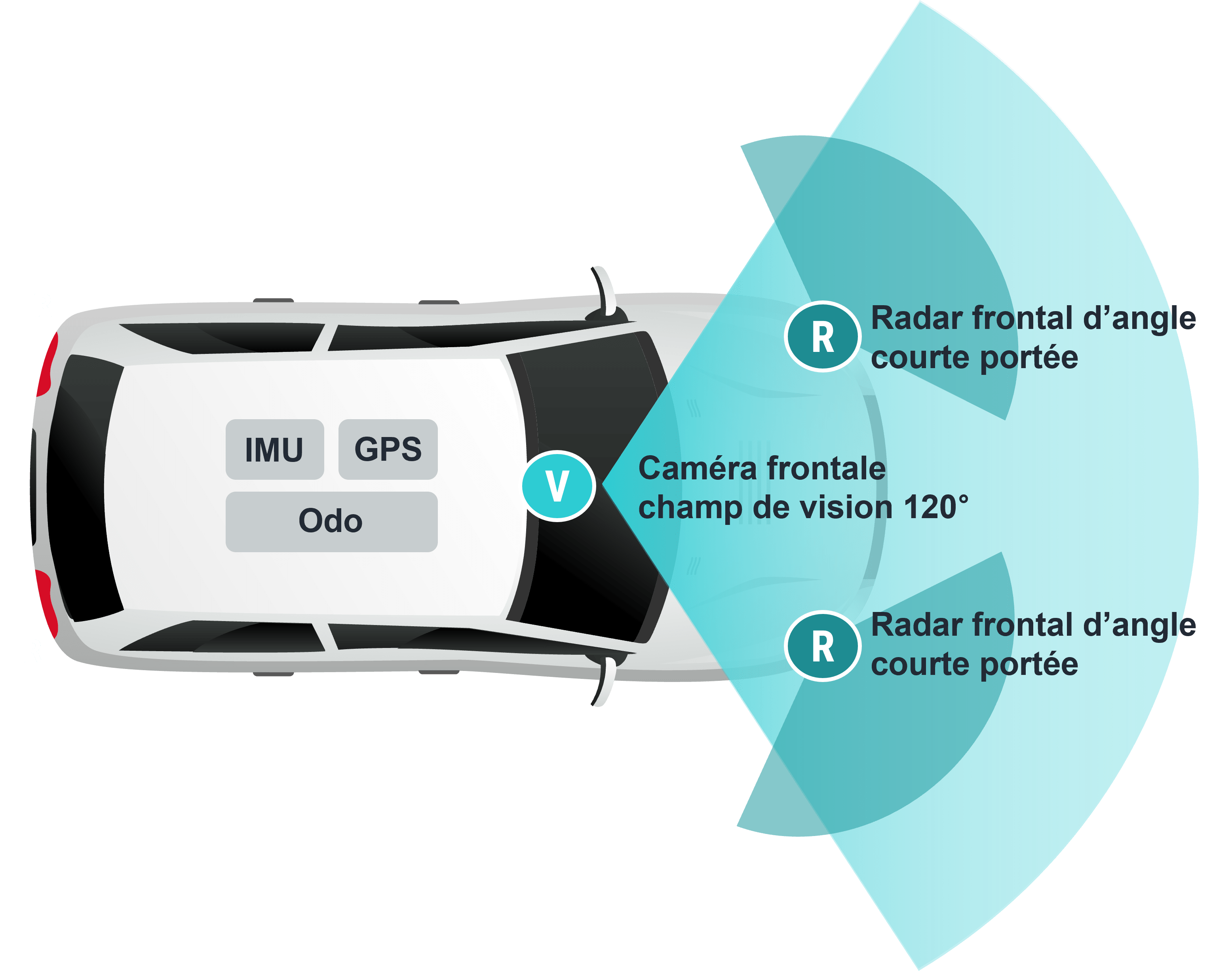
Le LVF-E est une solution complète de fusion et de perception à vision frontale qui vise les applications ADAS de niveau 2/2+ de base pour l’aide à la conduite sur autoroute et répondant aux exigences de sécurité 5 étoiles NCAP 2025 et GSR 2022. Le savoir-faire en fusion bas niveau de LeddarTech repousse les limites du progrès technologique en doublant la portée effective des capteurs et en permettant, pour la première fois, une solution ne comportant qu’une caméra frontale unique de 120 degrés et deux radars d’angle frontaux à courte portée dans une configuration 1V2R. L’accessibilité de la méthode de détection utilisée et le recours judicieux au processeur TDA4VE de Texas Instruments permettent d’obtenir les coûts les plus bas pour un système ADAS de niveau 2/2+ de base.
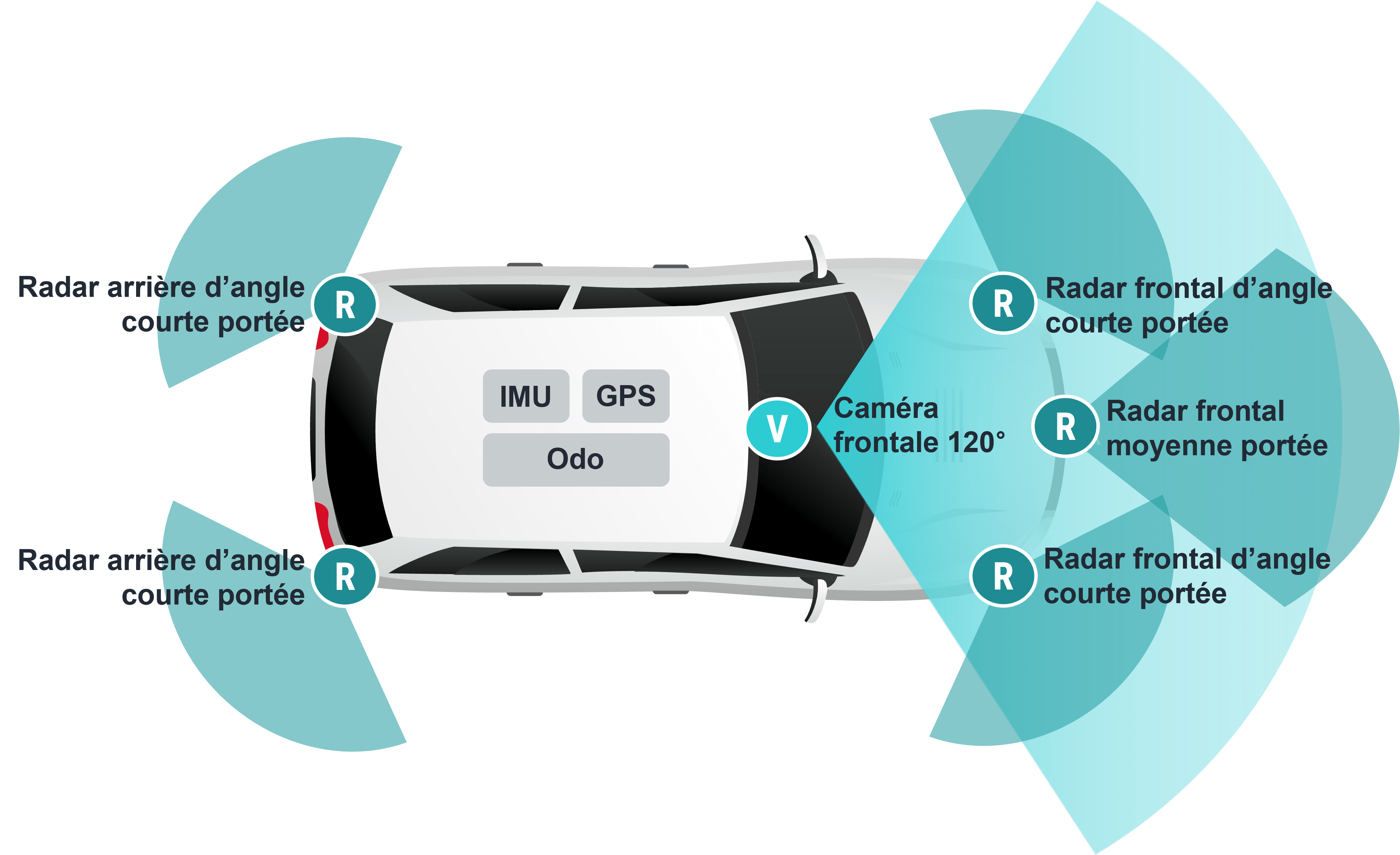
Supportant une configuration de capteurs étendue à 1V5R avec une caméra unique de 120 degrés, un radar frontal unique à moyenne portée et quatre radars d’angle à courte portée, la solution LVF-H étend la perception aux applications d’aide à la conduite sur autoroute, y compris la régulation de vitesse adaptative jusqu’à 160 km/h, une portée de détection atteignant 200 mètres et le changement de voie semi-automatisé. Le système améliore également la gestion des scénarios de dépassement, de marche arrière et d’ouverture de portière selon les critères NCAP 2025. De plus, des combinaisons de capteurs à moindre coût peuvent être utilisées grâce au recours à la plateforme Orin, permettant de répondre de manière économique aux exigences des applications ADAS haut de gamme de niveau 2/2+.
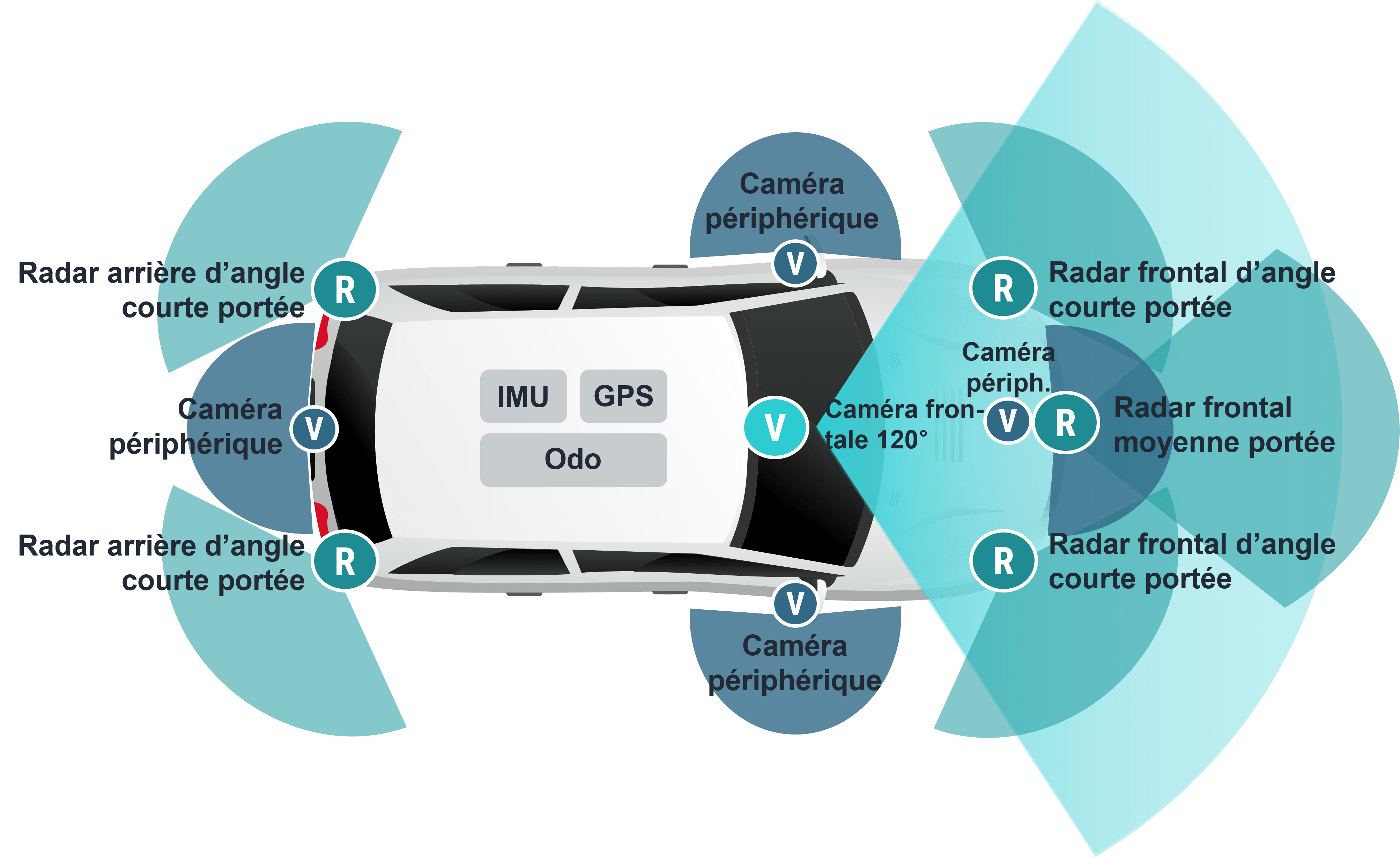
Le LVS-2+ est une solution logicielle complète de fusion et de perception à vision périphérique (« surround view ») qui supporte les applications ADAS de niveau 2/2+ d’aide à la conduite sur autoroute et de sécurité 5 étoiles NCAP 2025 et GSR 2022 complètes. Reposant sur l’architecture de LeddarVision, le LVS-2+ étend efficacement la configuration de capteurs 1VxR de la famille de produits à vision frontale LVF de base à une configuration 5V5R en améliorant la prise en charge de l’aide à la conduite en embouteillage (TJA) et de l’aide à la conduite sur autoroute (HWA), et en permettant le changement de voie automatisé, le dépassement ainsi que la régulation de vitesse adaptative (ACC) sur une plus grande plage de vitesse.
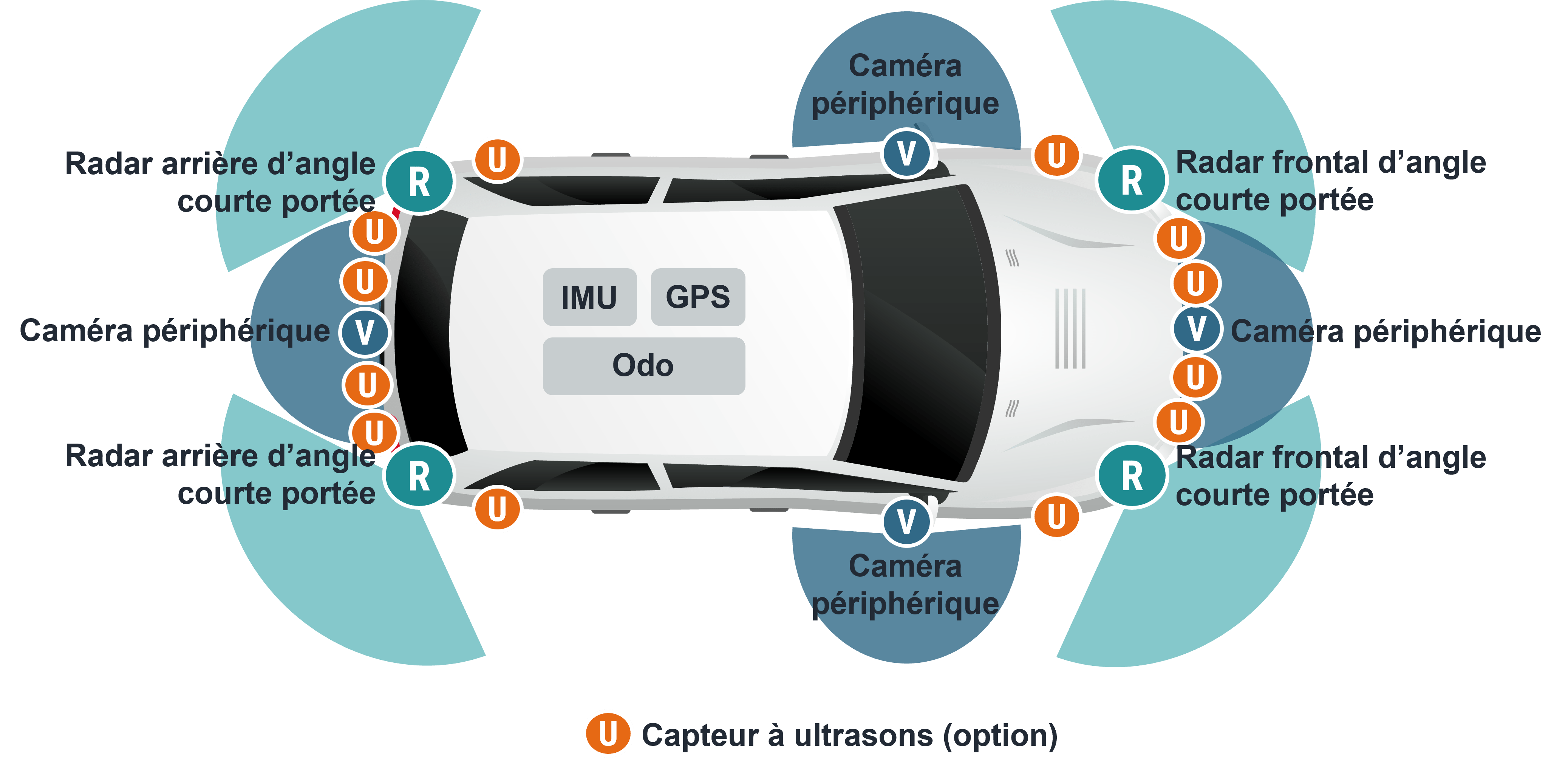
Le LVP-H est une solution logicielle complète de fusion et de perception qui prend en charge les applications ADAS de niveau 2/2+ d’aide au stationnement, y compris l’aide au stationnement intelligente (IPA) et l’aide au stationnement à distance (RPA). Le LVP-H augmente la probabilité de détection des stationnements valides à plus de 95 % avec un faible taux de fausses détections dans les ODD et les environnements difficiles, et permet une détection supérieure des objets dynamiques et statiques pour une sécurité accrue, y compris en appui aux scénarios de sécurité avancés de la NHTSA visant l’aide au stationnement intelligente. Le LVP-H utilise une configuration de capteurs 4V4R avec quatre caméras à ultra-grand angle (de type « fish-eye ») à champ de vision de 190° et quatre radars d’angle à courte portée, et accepte jusqu’à 12 capteurs à ultrasons en option.


LeddarVision est une solution de classe automobile performante, indépendante des capteurs et qui génère des modèles 3D précis de l’environnement. Cette solution logicielle évolutive prend en charge tous les niveaux d’autonomie de la classification SAE en appliquant des algorithmes d’intelligence artificielle et de vision numérique pour fusionner les données brutes générées par les capteurs présents dans les applications de niveau 2 à 5.

En décembre 2022, Ficosa et LeddarTech ont annoncé la signature d’une entente de développement et de commercialisation visant le développement d’un assistant de stationnement intelligent automatisé. Cette vidéo de 8 minutes faisant intervenir Ficosa et LeddarTech lève le voile sur cette entente.

Ce livre blanc explique le rôle croissant de l’ADAS dans les programmes NCAP. Il présente une vue sommaire des scénarios, des conditions et des environnements dans lesquels les essais sont réalisés et donne un aperçu du rôle que les systèmes de perception doivent jouer pour que les constructeurs automobiles puissent rester à l’avant-garde des exigences NCAP.